PowerH SERIES
8 RS-232 Interface
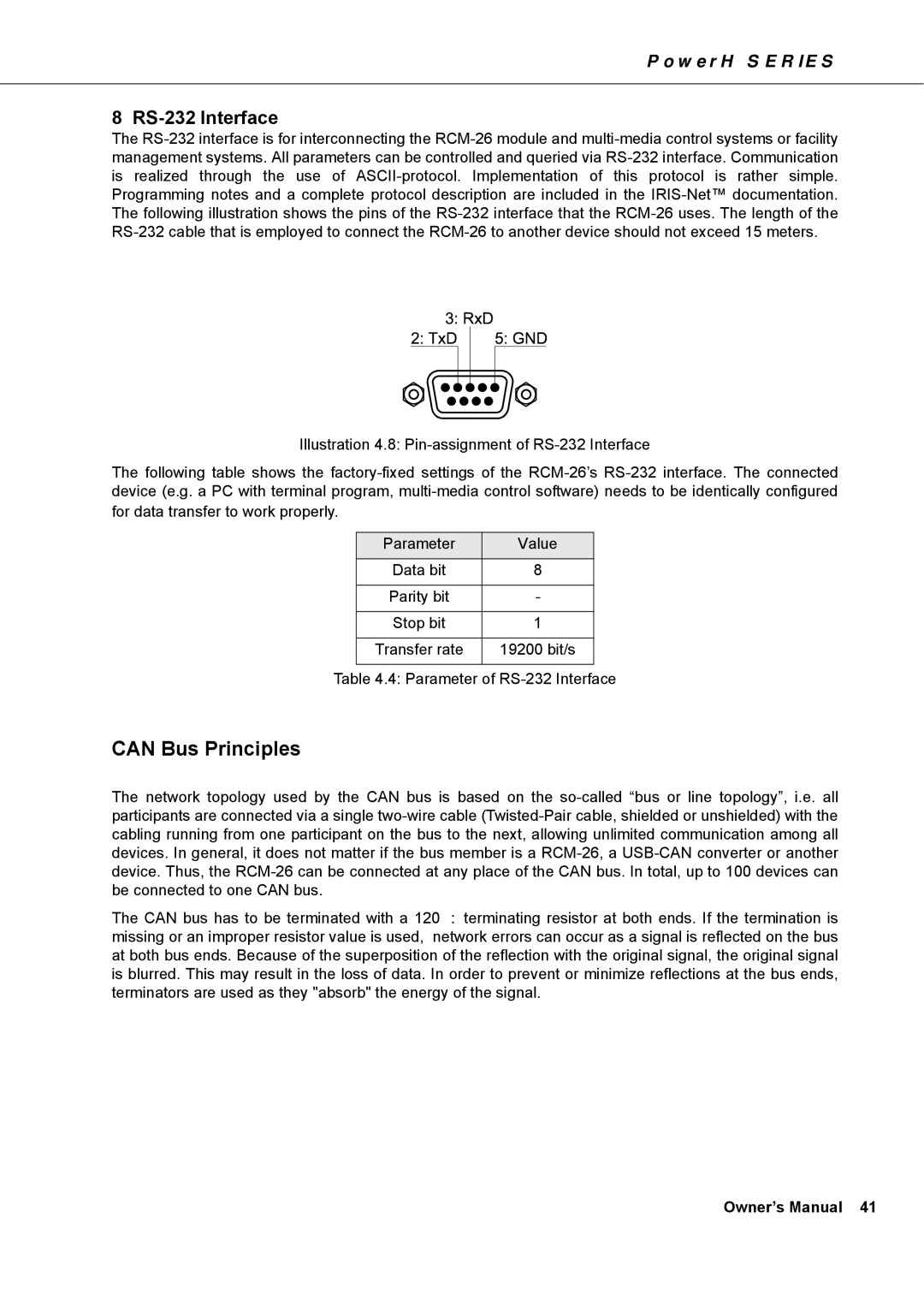
The RS-232 interface is for interconnecting the RCM-26 module and multi-media control systems or facility management systems. All parameters can be controlled and queried via RS-232 interface. Communication is realized through the use of ASCII-protocol. Implementation of this protocol is rather simple. Programming notes and a complete protocol description are included in the IRIS-Net™ documentation. The following illustration shows the pins of the RS-232 interface that the RCM-26 uses. The length of the RS-232 cable that is employed to connect the RCM-26 to another device should not exceed 15 meters.
Illustration 4.8: Pin-assignment of RS-232 Interface
The following table shows the factory-fixed settings of the RCM-26’s RS-232 interface. The connected device (e.g. a PC with terminal program, multi-media control software) needs to be identically configured for data transfer to work properly.
Parameter | Value |
Data bit | 8 |
| |
Parity bit | - |
| |
Stop bit | 1 |
| |
Transfer rate | 19200 bit/s |
| |
Table 4.4: Parameter of RS-232 Interface
CAN Bus Principles
The network topology used by the CAN bus is based on the so-called “bus or line topology”, i.e. all participants are connected via a single two-wire cable (Twisted-Pair cable, shielded or unshielded) with the cabling running from one participant on the bus to the next, allowing unlimited communication among all devices. In general, it does not matter if the bus member is a RCM-26, a USB-CAN converter or another device. Thus, the RCM-26 can be connected at any place of the CAN bus. In total, up to 100 devices can be connected to one CAN bus.
The CAN bus has to be terminated with a 120 Ω terminating resistor at both ends. If the termination is missing or an improper resistor value is used, network errors can occur as a signal is reflected on the bus at both bus ends. Because of the superposition of the reflection with the original signal, the original signal is blurred. This may result in the loss of data. In order to prevent or minimize reflections at the bus ends, terminators are used as they "absorb" the energy of the signal.