PowerH SERIES
8 RS-232 Schnittstelle
Die RS-232 Schnittstelle dient der Verbindung des RCM-26 mit Mediensteuerungssystemen bzw. Gebäudemanagementsystemen. Über RS-232 können sämtliche Parameter gesteuert und abgefragt werden. Die Kommunikation erfolgt über ein einfach zu implementierendes ASCII-Protokoll. Programmierhinweise und eine vollständige Protokollbeschreibung sind in der IRIS-Net™-Dokumentation enthalten.
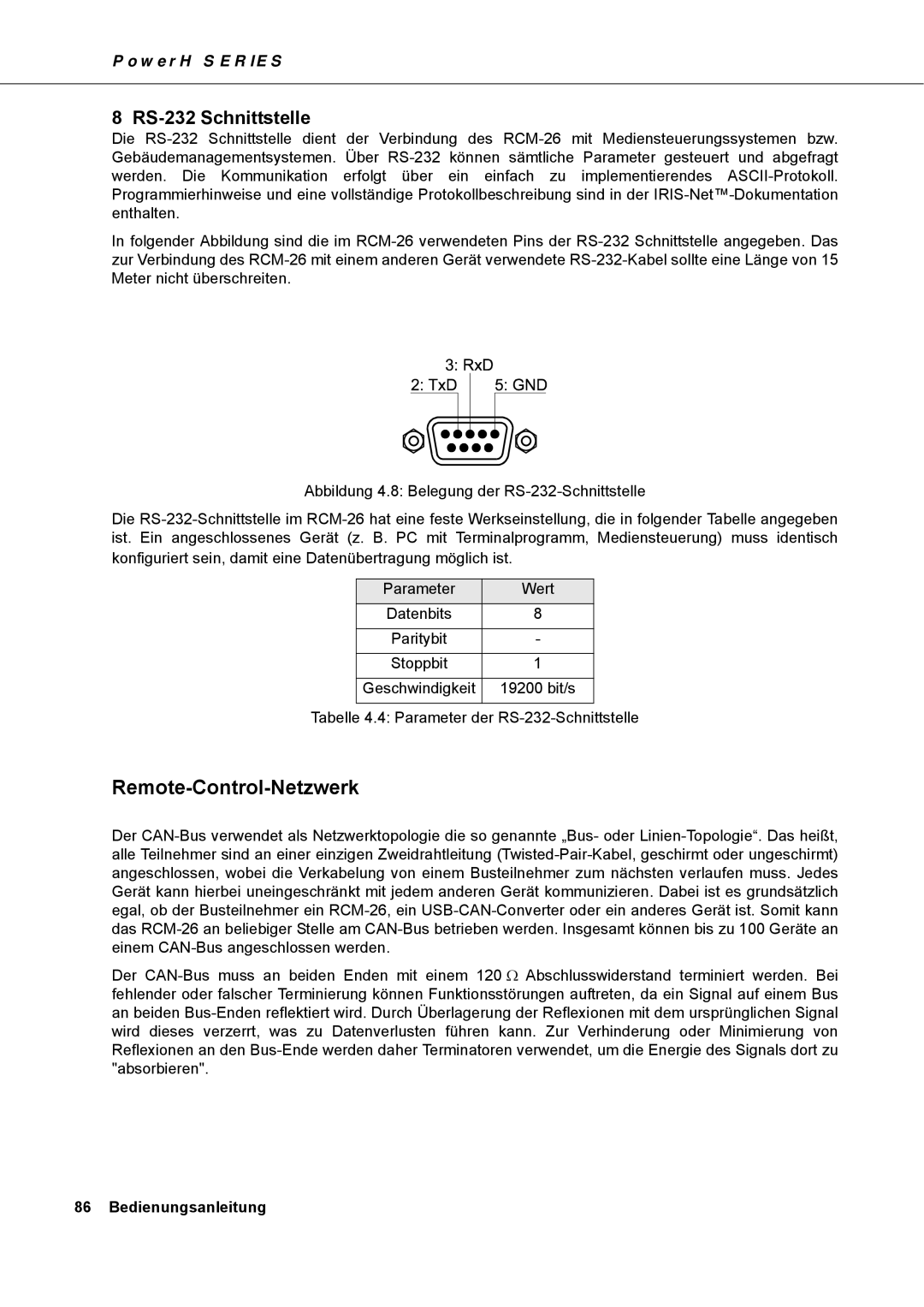
In folgender Abbildung sind die im RCM-26 verwendeten Pins der RS-232 Schnittstelle angegeben. Das zur Verbindung des RCM-26 mit einem anderen Gerät verwendete RS-232-Kabel sollte eine Länge von 15 Meter nicht überschreiten.
Abbildung 4.8: Belegung der RS-232-Schnittstelle
Die RS-232-Schnittstelle im RCM-26 hat eine feste Werkseinstellung, die in folgender Tabelle angegeben ist. Ein angeschlossenes Gerät (z. B. PC mit Terminalprogramm, Mediensteuerung) muss identisch konfiguriert sein, damit eine Datenübertragung möglich ist.
Parameter | Wert |
Datenbits | 8 |
| |
Paritybit | - |
| |
Stoppbit | 1 |
| |
Geschwindigkeit | 19200 bit/s |
| |
Tabelle 4.4: Parameter der RS-232-Schnittstelle
Remote-Control-Netzwerk
Der CAN-Bus verwendet als Netzwerktopologie die so genannte „Bus- oder Linien-Topologie“. Das heißt, alle Teilnehmer sind an einer einzigen Zweidrahtleitung (Twisted-Pair-Kabel, geschirmt oder ungeschirmt) angeschlossen, wobei die Verkabelung von einem Busteilnehmer zum nächsten verlaufen muss. Jedes Gerät kann hierbei uneingeschränkt mit jedem anderen Gerät kommunizieren. Dabei ist es grundsätzlich egal, ob der Busteilnehmer ein RCM-26, ein USB-CAN-Converter oder ein anderes Gerät ist. Somit kann das RCM-26 an beliebiger Stelle am CAN-Bus betrieben werden. Insgesamt können bis zu 100 Geräte an einem CAN-Bus angeschlossen werden.
Der CAN-Bus muss an beiden Enden mit einem 120 Ω Abschlusswiderstand terminiert werden. Bei fehlender oder falscher Terminierung können Funktionsstörungen auftreten, da ein Signal auf einem Bus an beiden Bus-Enden reflektiert wird. Durch Überlagerung der Reflexionen mit dem ursprünglichen Signal wird dieses verzerrt, was zu Datenverlusten führen kann. Zur Verhinderung oder Minimierung von Reflexionen an den Bus-Ende werden daher Terminatoren verwendet, um die Energie des Signals dort zu "absorbieren".
86 Bedienungsanleitung