HOW SONAR WORKS
Sonar technology is based on sound waves. The ICE Flasher Series™ Fishfinder uses sonar to locate structure, bottom composition, as well as depth directly below the transducer. YourICE Flasher Series™Fishfinder consists of two components: the control head and the transducer. The control head containsthe transmitter and receiver, as well as the user controls and display. The transducer is suspended beneath the water, underneath the ice, and converts electrical energy from the transmitter into mechanical pulses or sound waves. The transducer also receives the reflected sound waves and converts them back into electrical signals for display on the Flasher Dial.
NOTE: The transducer must be submerged in water for reliable transducer detection. The bottom of the transducer should be even with the bottom of the ice or hang slightly below the bottom of the ice.
Your ICE Flasher Series™ Fishfinder sends a sound wave signal and determinesdistance by measuring the time between the transmission of the sound wave and when the sound wave is reflected off of an object; it then uses the reflected signal to interpret depth, size, and composition of an object.
Sonar is very fast. A sound wave can travel from the surface to a depth of 240 ft (70 m) and back again in less than 1/4 of a second.
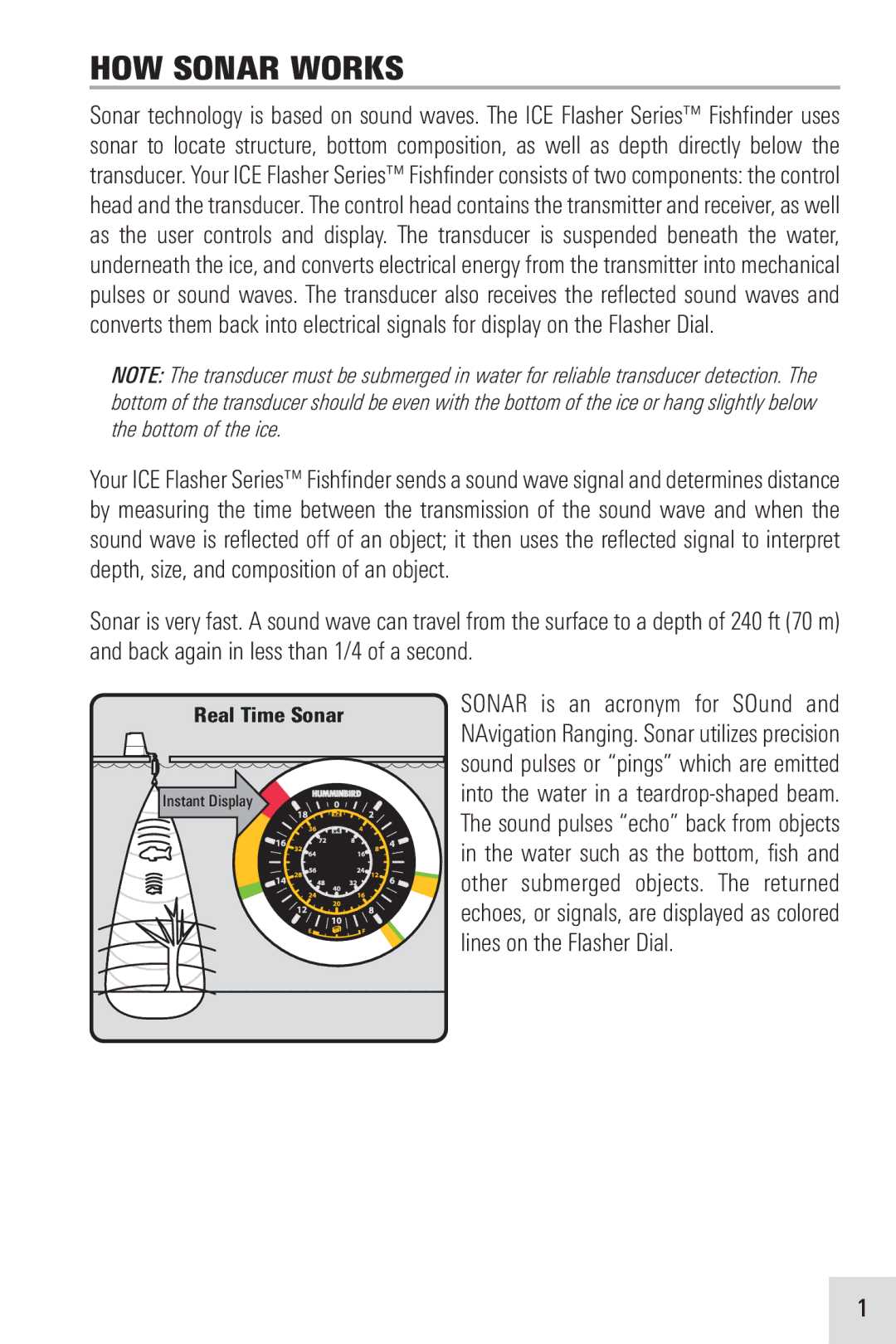
Real Time Sonar
Instant Display ![]()
SONAR is an acronym for SOund and NAvigation Ranging. Sonar utilizes precision sound pulses or “pings” which are emitted into the water in a
1