6 Lead Motors
Like 8 lead stepping motors, 6 lead motors have two configurations available for high speed or high torque operation. The higher speed configuration, or half coil, is so described because it uses one half of the motor’s inductor windings. The higher torque configuration, or full coil, uses the full windings of the phases.
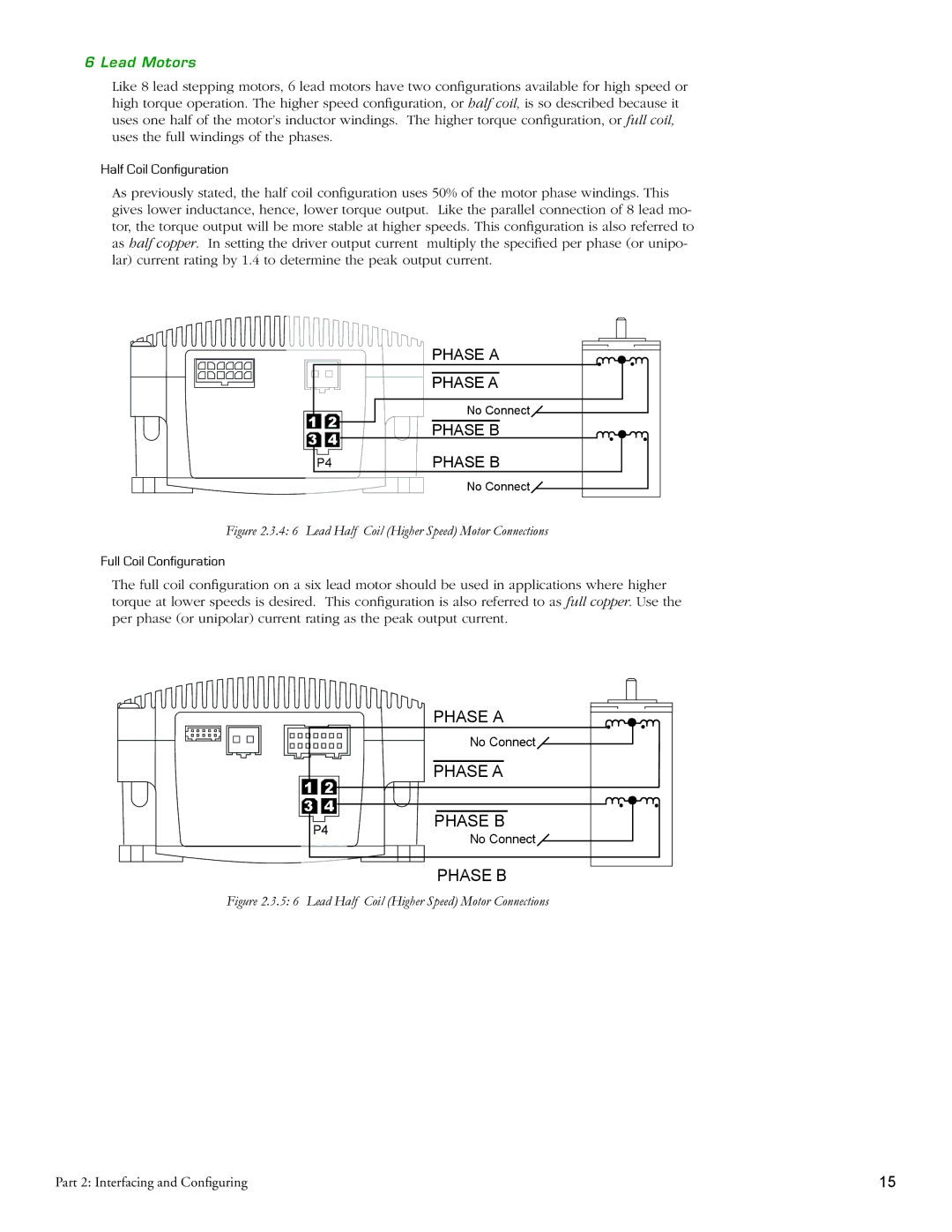
Half Coil Configuration
As previously stated, the half coil configuration uses 50% of the motor phase windings. This gives lower inductance, hence, lower torque output. Like the parallel connection of 8 lead mo- tor, the torque output will be more stable at higher speeds. This configuration is also referred to as half copper. In setting the driver output current multiply the specified per phase (or unipo- lar) current rating by 1.4 to determine the peak output current.
|
| PHASE A | |
|
| PHASE A | |
1 | 2 | No Connect | |
PHASE B | |||
3 | 4 | ||
| |||
P4 | PHASE B | ||
|
| No Connect | |
Figure 2.3.4: 6 Lead Half Coil (Higher Speed) Motor Connections
Full Coil Configuration
The full coil configuration on a six lead motor should be used in applications where higher torque at lower speeds is desired. This configuration is also referred to as full copper. Use the per phase (or unipolar) current rating as the peak output current.
1 | 2 |
3 | 4 |
P4 | |
PHASE A
No Connect![]()
PHASE A
PHASE B
No Connect![]()
PHASE B
Figure 2.3.5: 6 Lead Half Coil (Higher Speed) Motor Connections
Part 2: Interfacing and Configuring | 15 |