Advanced Menu
Block Title | Parameter | Description | |||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Advanced | Current | Rated Current – (View Only) this value is the continuous current rating of the control. | |||||||||||||||||||||||||
|
| Low Current – If on, activates low current trip protection. Useful to detect a low current | |||||||||||||||||||||||||
|
| condition (broken belt, coupling, pump etc.) on driven equipment. | |||||||||||||||||||||||||
|
| Low Current Level – The value of the low current trip detection. Value can be 0 to 100% | |||||||||||||||||||||||||
|
| of the Rated Current parameter value. Parameter 28. | |||||||||||||||||||||||||
|
| Low Current Time – The number of power cycles the motor current is allowed to remain | |||||||||||||||||||||||||
|
| below the low current level before a low current trip occurs. Value can be 5 to 255 | |||||||||||||||||||||||||
|
| cycles. Parameter 29. | |||||||||||||||||||||||||
|
| C/L Time Out – If on, allows current limit time out trip (active). | |||||||||||||||||||||||||
|
| Current Limit – The value of the current limit trip detection. Value can be 1 to 7.9 times | |||||||||||||||||||||||||
|
| the Rated Current parameter value. Parameter 30. | |||||||||||||||||||||||||
|
| Limit Time Out – The number of seconds | |||||||||||||||||||||||||
|
| Value can be 0 to 255 seconds. Parameter 31. | |||||||||||||||||||||||||
|
| Shearpin – If on, Shearpin protection is active. Useful to detect a high current condition | |||||||||||||||||||||||||
|
| (such as a jammed conveyor or press) on driven equipment. | |||||||||||||||||||||||||
|
| Shearpin Level – The value of the high current Shearpin trip detection. Value can be 1 to | |||||||||||||||||||||||||
|
| 5 times the Rated Current parameter value. Parameter 32. | |||||||||||||||||||||||||
|
| Shearpin Time – The number of power cycles the motor current is allowed to remain | |||||||||||||||||||||||||
|
| above the low shearpin level before a Shearpin trip occurs. Value can be | |||||||||||||||||||||||||
|
| cycles. Parameter 33. | |||||||||||||||||||||||||
|
| Overload Level – Provides overload protection for SCR’s. (Not for motor thermal | |||||||||||||||||||||||||
|
| overload). The value of the overload current trip detection. Value can be 0.6 to 2 | |||||||||||||||||||||||||
|
| times the Rated Current parameter value. Parameter 34. | |||||||||||||||||||||||||
|
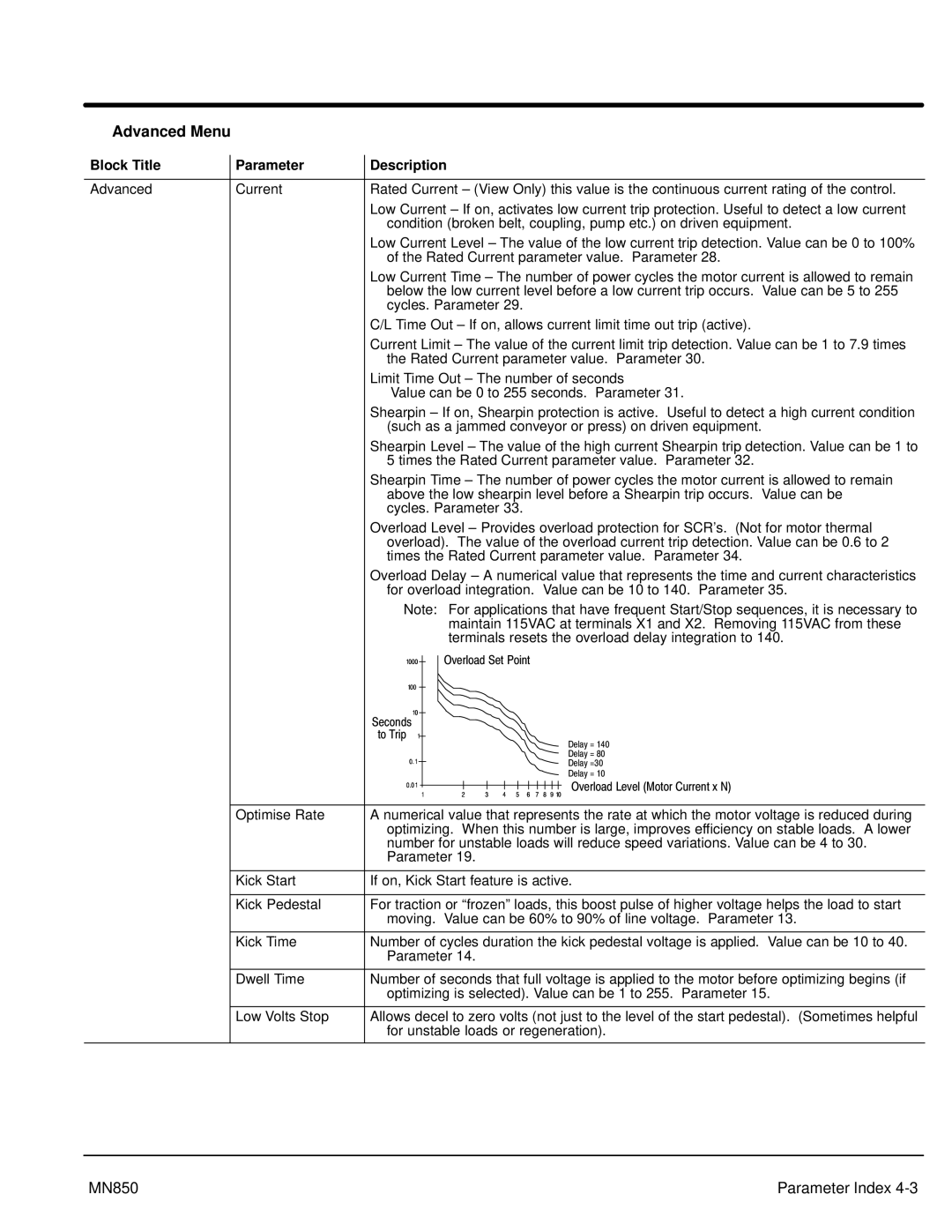
| Overload Delay – A numerical value that represents the time and current characteristics | |||||||||||||||||||||||||
|
| for overload integration. Value can be 10 to 140. Parameter 35. | |||||||||||||||||||||||||
|
| Note: For applications that have frequent Start/Stop sequences, it is necessary to | |||||||||||||||||||||||||
|
|
|
|
|
|
|
| maintain 115VAC at terminals X1 and X2. Removing 115VAC from these | |||||||||||||||||||
|
|
|
|
|
|
|
| terminals resets the overload delay integration to 140. | |||||||||||||||||||
|
|
|
|
|
|
|
| Overload Set Point | |||||||||||||||||||
|
|
|
|
|
| ||||||||||||||||||||||
|
|
|
|
|
| ||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Seconds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
| to Trip |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Delay = 140 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Delay = 80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Delay =30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Delay = 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Overload Level (Motor Current x N) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
| |||||||||||||||||||||||||
| Optimise Rate | A numerical value that represents the rate at which the motor voltage is reduced during | |||||||||||||||||||||||||
|
| optimizing. When this number is large, improves efficiency on stable loads. A lower | |||||||||||||||||||||||||
|
| number for unstable loads will reduce speed variations. Value can be 4 to 30. | |||||||||||||||||||||||||
|
| Parameter 19. | |||||||||||||||||||||||||
|
|
| |||||||||||||||||||||||||
| Kick Start | If on, Kick Start feature is active. | |||||||||||||||||||||||||
|
|
| |||||||||||||||||||||||||
| Kick Pedestal | For traction or “frozen” loads, this boost pulse of higher voltage helps the load to start | |||||||||||||||||||||||||
|
| moving. Value can be 60% to 90% of line voltage. Parameter 13. | |||||||||||||||||||||||||
|
|
| |||||||||||||||||||||||||
| Kick Time | Number of cycles duration the kick pedestal voltage is applied. Value can be 10 to 40. | |||||||||||||||||||||||||
|
| Parameter 14. | |||||||||||||||||||||||||
|
|
| |||||||||||||||||||||||||
| Dwell Time | Number of seconds that full voltage is applied to the motor before optimizing begins (if | |||||||||||||||||||||||||
|
| optimizing is selected). Value can be 1 to 255. Parameter 15. | |||||||||||||||||||||||||
|
|
| |||||||||||||||||||||||||
| Low Volts Stop | Allows decel to zero volts (not just to the level of the start pedestal). (Sometimes helpful | |||||||||||||||||||||||||
|
| for unstable loads or regeneration). | |||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MN850 | Parameter Index |