Marathon Monitors Inc.
2. To invert a PID output, the Val. H can be set below the Val.L
Name
Description
Values Meaning
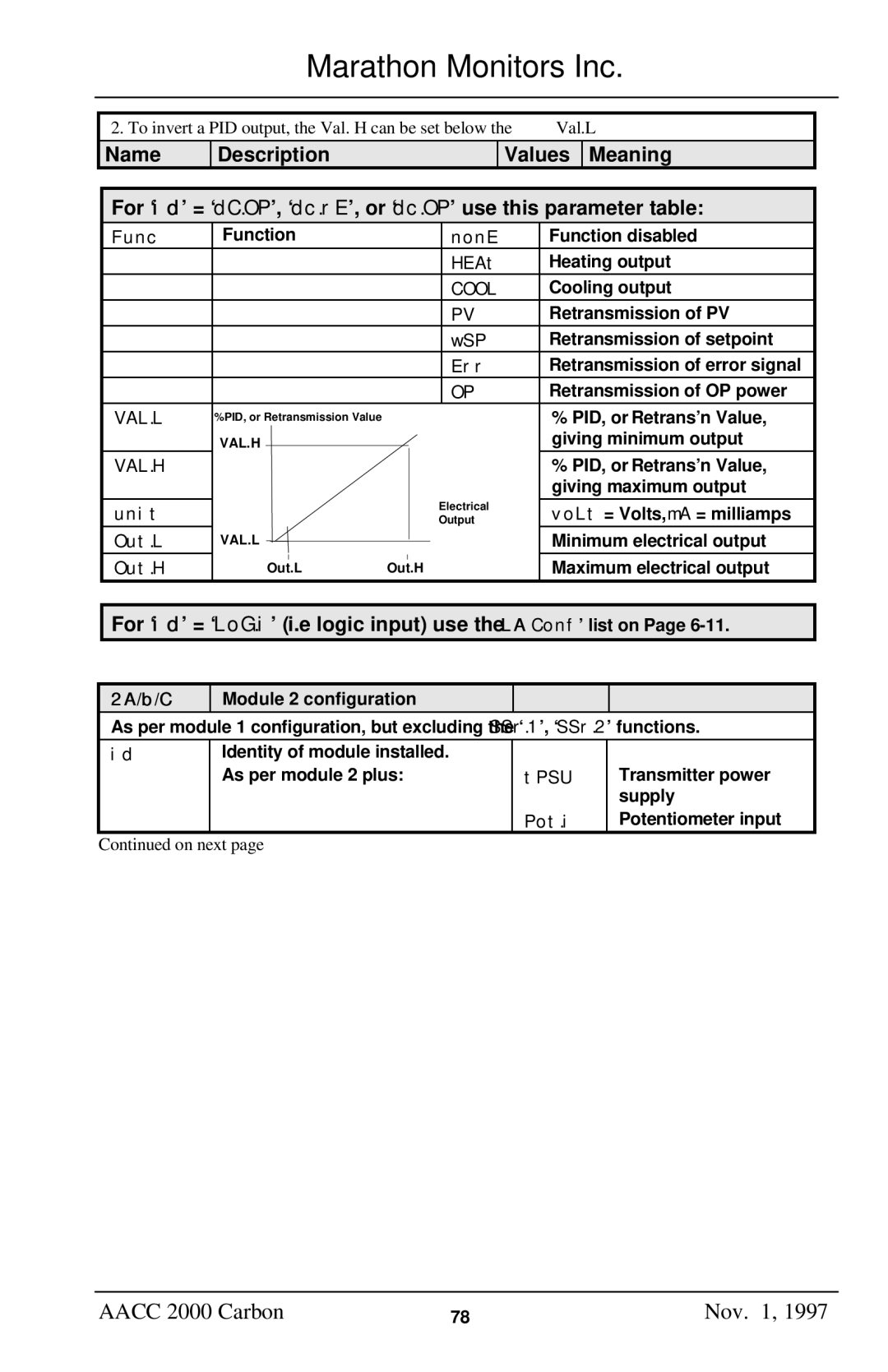
For ‘id’ = ‘dC.OP’, ‘dc.rE’, or ‘dc.OP’ use this parameter table:
Func | Function | nonE | Function disabled |
|
| HEAt | Heating output |
|
| COOL | Cooling output |
|
| PV | Retransmission of PV |
|
| wSP | Retransmission of setpoint |
|
| Err | Retransmission of error signal |
|
| OP | Retransmission of OP power |
VAL.L | %PID, or Retransmission Value |
| % PID, or Retrans’n Value, |
| VAL.H |
| giving minimum output |
VAL.H |
|
| % PID, or Retrans’n Value, |
|
|
| giving maximum output |
unit |
| Electrical | voLt = Volts, mA = milliamps |
| Output | ||
Out.L | VAL.L |
| Minimum electrical output |
Out.H | Out.L | Out.H | Maximum electrical output |
For ‘id’ = ‘LoG.i’ (i.e logic input) use the LA Conf’ list on Page 6-11.
2A/b/C
Module 2 configuration
As per module 1 configuration, but excluding the ‘SSr.1’, ‘SSr.2’ functions.
id
Identity of module installed. As per module 2 plus:
tPSU
Pot.i
Transmitter power supply Potentiometer input
Continued on next page
AACC 2000 Carbon | 78 | Nov. 1, 1997 |