Page
Page
Page
PLEASE READ PRIOR TO INSTALLATION FOR SAFETY
Preface
DANGER
Page
Table of Contents
Table of Contents
Chapter 2 Installation and Wiring
Preface
Chapter 5 Parameters
Chapter 4 Digital Keypad Operation
Chapter 7 Troubleshooting
Chapter 6 Fault Code Information
Appendix A Specifications
Chapter 8 Maintenance and Inspections
Appendix B Accessories
Appendix C How to Select the Right AC Motor Drive
1.1 Receiving and Inspection
Chapter 1 Introduction
1.1.1 Nameplate Information
1.1.2 Model Explanation
1.1.4 Drive Frames
1.1.3 Series Number Explanation
1.2 Appearances
Taoyuan 230V 3-phase 1HP0.75kW Model
1.3 Installation Steps
1.4 Storage
3. If the AC motor drive is stored for more than 3 months, the temperature should not be higher than 30 C. Storage longer than one year is not recommended, it could result in the degradation of the electrolytic capacitors
This page intentionally left blank
2.2 Installation
Chapter 2 Installation and Wiring
2.1 Ambient Conditions
Air Flow
150mm 6inch
50mm 2inch 50mm 2inch 150mm 6inch
Dimensions are in millimeter and inch
2.3 Dimensions
Frame S1 VFD002S11A, VFD002S21A, VFD002S23A
88 .0 3 .4
5. 8 0
13 .0 0 .5
73 .0 2 .8
5. 8 0
3 .3
2 .9
5. 0 0
10 2. 0 4
85 .0 3 .3
74 .0 2 .9
2. 8
12 4. 0 4 2. 8 0 5. 0 0
85 .0 3 .3 74 .0 2 .9
2.25.21
8.05.83
12 4. 0 4
3 .3
2 .9
2. 8 0
13 2.2 5.21 14 8.0 3.0 0
12 6. 0 4 3. 0 0 5. 0 0
3. 0 0
12 6. 0 4
67 .8 2 .6
51 .0 2 .0
5. 8 0
3 .3
12 7. 0 5
2 .9
5. 4 0
86 .5 3 .4
12 9. 0 5
5. 5 0
6.82
10 0. 0 3 86 .5 3 .4 73 .0 2 .8
9.50.38
5. 4 0
5. 5 0
5. 4 0
12 9. 3 5 8. 5 0
86 .5 3 .4
67.8
Frame S2 VFD015S21U, VFD015S43U, VFD022S21U, VFD022S43U
53.9
6.50.26
2.4 Wiring
Basic Wiring Diagrams
2.4.1 Basic Wiring
fault output
when power supply
For VFDXXXSXXA/B/D/U
Recommended Circuit
R/L1
Chapter 2 Installation and WiringVFD-S Series
S/L2
T/L3
Two/Three wire control
NPN Mode
For VFDXXXSXXE
PNP Mode
2.4.2 External Wiring
Mains power terminals R/L1, S/L2, T/L3 and L/L1, N/L2
2.4.3 Main Terminals Connections
Control circuit terminals U/T1, V/T2, W/T3
Forward running
Terminals +2/B1, B2 for connecting brake resistor
Terminals +2/B1, +1 for connecting DC reactor
Grounding terminals
RJ11
2.4.4 Control Terminals
AFM circuit
Control signal wiring size 18 AWG 0.75 mm2 with shielded wire
Internal Circuit
Analog input terminals AVI, GND
wind each wires 3 times or more around the core
Digital inputs M0~M5, GND
Digital outputs MO1, MCM
2.4.5 Main Circuit Terminals
Power terminal
2-28
AC Input Line
AC Input Line
2-29
Motor
Terminal
Groun d Brake DC Reactor Resistor
2-30
2-31
Power terminal
Groun d
Brake Resistor
Groun d Brake DC Reacto r Resistor
2-32
Br ake DC Reacto r
2-33
Resistor
2-34
3.1 Preparations before Start-up
Chapter 3 Start Up
The keypad should light up as follows normal status with no error
If the drive has built-in fan, it should run
3.3 Trial Run
3.2 Operation Method
„ Check if the motor direction of rotation is correct
„ Check if acceleration and deceleration are smooth
1. Stop running immediately if any fault occurs and refer to the troubleshooting guide for solving the problem
Chapter 3 Start Up VFD-S Series
Chapter 4 Digital Keypad Operation
4.2 Explanation of LED Indicators
4.1 Description of the Digital Keypad
4.3 Explanations of Display Messages
The internal PLC process step currently being performed
To shift data
4.4 How to Operate the Digital Keypad
Chapter 4 Digital Keypad OperationVFD-S Series
Chapter 5 Parameters
Chapter 5 ParametersVFD-S Series
5.1 Summary of Parameter Settings
Group 2 Operation Method Parameters
Setting
Setting
Group 3 Output Function Parameters
Setting
Group 5 Multi-Step Speed and PLC Parameters
Setting
Settings
Explanation
Factory
Explanation
Group 9 Communication Parameters
Setting
5.2 Parameter Settings for Applications
„ Two-wire/three-wire
„ Over-torque Setting
„ Output Signal during Running
„ Output Signal when Frequency Attained
This parameter can be set during operation
5.3 Description of Parameter Settings
0-00
0-01
0-04
d2 Multifunction display, see Pr.0-04 d3 Display output current LED A
0-05
0-07
0-06
0-08
0-08
Password Decode Flow Chart
0-07
0-09
8 factory setting
Setting for Pr
Chapter 5 Parameters VFD-S Series
5-21
1-01
1-00
1-02
1-03
1-06
1-05
Standard V/F Curve
1-07
1-10
1-09
1-11
1-12
Frequency
Acceleration Time Jog operation commandON
Time
Max. output Freq. Pr.1-00
Enable S curve
Disable S curve
Acceleration/deceleration Characteristics
1-18
J1 Voltage signal input0-10V Current signal input4-20mA
2-02
2-01 Source of Operation Command
10kHz
3kHz
115V/230V/460V Series
2-05 Loss of ACI Signal 4-20mA
Analog Frequency Meter
3-01
Analog Current Meter
Freq
2ms 2ms The width of trigger signal should not be less than 2ms250 Hz
Counter Trigger Signal Multi-function Input Terminal
3-06
Display Pr.0-04=d1 TRG
Function
4-01
4-00
4-02
4-03
This example shows a potentiometer range of 0 to 5 Volts
Max Output Pr.1-00 Freq 60Hz
Potentiometer Scale
0 Hz
Potentiometer Scale
4-07
4-06
4-08
Parameters & Functions table
REV/STOP
FWD/STOP
RUN/STOP
REV/FWD
RESET Mx Close Operation available setting by d6 GND
setting by d5 GND
d4, d5 External Faults
d6 External Reset
d10 Jog Operation Control
Mx Close Operation available d10 jog operation command GND
d11 Acceleration/Deceleration Speed Inhibit
d13, d14 External Base Block
d12 First or Second Acceleration/Deceleration Time Selection
Chapter 5 ParametersVFD-S Series
Mx OpenOperation available. setting by d14 GND
B.B.N.O Mx Close Operation available. setting by d13 B.B.N.C
UP setting by d15 DOWN setting by d16
Mx Close Freq. will increase by one unit
setting by d18 GND
PLC operation Mx Close Run PLC. setting by d17 Mx ClosePause PLC
d19 Counter Trigger
d20 Counter Reset
Reset counter Mx close reset counter d20 reset the counter value GND
d22 PID function disable
d27 Press UP/DOWN key to switch forward/reverse N.O. motion
RUN/STOP
4-11
M0 Open Stop, Close Run M1 No Function GND
5-01
5-00
5-02
5-03
Example 2 Pr.5-07 = d2 Continuously executes program cycles
Example 4 Pr. 5-07 =d4 Continuously execute PLC cycles step by step
Example 3 Pr. 5-07 = d3 Execute one cycle step by step
Example 5 Pr. 5-07 = d1 Execute one cycle of the PLC program
Weights
5-08
0=Forward
5-10
5-09
5-11
5-12
6-01
Over-current Stall Prevention Level
Over-voltage Stall Prevention
6-04
6-03 Over-Torque Detection Mode OL2
6-05
6-07
Second Most Recent Fault Record
Present Fault Record
Third Most Recent Fault Record
6-08
d20 Software protection enable codE d21 Reserved
7-01
7-00
7-02
7-03
8-00
Output Frequency
8-01
8-02
8-05
8-04 Momentary Power Loss Operation Selection
8-06
8-07
8-10
8-08 Skip Frequency 1 Upper Limit
8-11
8-12
Automatic Voltage Regulation AVR
8-15
8-16
8-17
RS485
9-01
Computer
1 +EV 2 GND 3 SG- 4 SG+
9-03
RTU mode
ASCII mode
7.N.2
7.E.1
RTU mode
3.2 ADR Communication Address
RTU mode Command message
3 Command code 10H, write n word, n=12
3.4 Check sum ASCII mode
Unsigned char* data Å a pointer to the message buffer
Address
Content
Functions
Address
Exception
Error message
Meaning
code
3.7 Communication program of PC
A-01
A-00
A-02
A-03
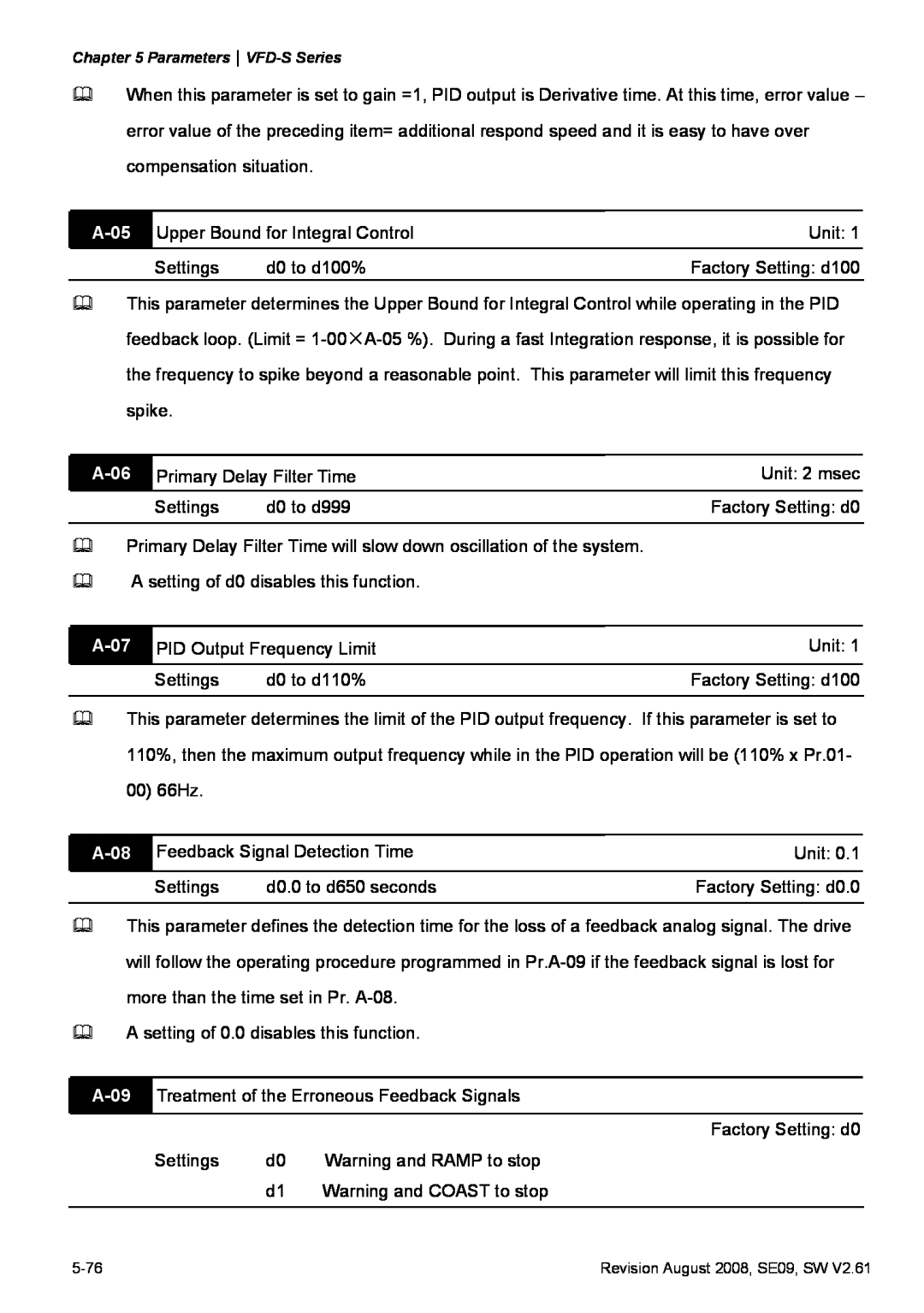
A-06
A-05
A-07
A-08
A-10
Sleep Function
A-11
A-12
1-00
+ + +
Drange
A-13 = 56-0 X 100100 X 10 =
6.1 Common Problems and Solutions
Chapter 6 Fault Code Information
Chapter 6 Fault Code InformationVFD-S Series
Fault
6.2 Reset
7.1 Over Current OC
Chapter 7 Troubleshooting
Over-current during acceleration
Over-current during deceleration
7.3 Over Voltage OV
7.2 Ground Fault
Ground fault
Chapter 7 Troubleshooting VFD-S Series
7.4 Low Voltage Lv
7.6 Overload
7.5 Over Heat OH
Check for correct settings at
OL1/ OL2
7.7 Keypad Display is Abnormal
7.8 Phase Loss PHL
Check if all connectors are connect correctly and no noise is present
Check wiring at R, S and T terminals
7.9 Motor cannot Run
Check to see if frequency is
7.10 Motor Speed cannot be Changed
out of range upper/lower
boundaries
7.12 The Motor does not Run as Expected
7.11 Motor Stalls during Acceleration
settings
Check if the inertia
7.14 Environmental Condition
7.13 Electromagnetic/Induction Noise
7.15 Affecting Other Machines
Daily Inspection
Chapter 8 Maintenance and Inspections
Periodic Inspection
Chapter 8 Maintenance and InspectionsVFD-S Series
Maintenance
„ DC capacity of main circuit
„ Printed circuit board and connector of main circuit
This page intentionally left blank
Voltage Class
Appendix A Specifications
115V Class
230V Class
General Specifications
Appendix A SpecificationsVFD-S Series
Voltage Class
460V Class
B.1 All Brake Resistors & Brake Units Used in AC Motor Drives
Appendix B Accessories
9. Definition for Brake Usage ED%
B.1.1 Dimensions and Weights for Brake resistors
Installation
B.2 EMI Filters
General precaution
Choose suitable motor cable and precautions
1. Use the cable with shielding double shielding is the best
The length of motor cable
Order P/N RF007S21AA/ RF007S43AA
B.2.1 Dimensions
Order P/N RF022S21BA
Order P/N 12DKT1W3S
POWER-IN
Order P/N 08TDT1W4S
B-10
B.3.2 AC Output Reactor Recommended Value
B.3 AC Reactor B.3.1 AC Input Reactor Recommended Value
B.3.3 Applications for AC Reactor
Application
B.4 DC Choke Recommended Values
Zero Phase Reactor
B.5 Zero Phase Reactor RF220X00A
Power
Supply
Models
B.6 Din Rail-DR01
Screw Size
Pr. 4-05 set to d06 M2 set for reset
B.7 Remote Controller RC-01
VFD-S Programming Pr. 2-00 set to d01 Pr. 2-01 set to d01
Pr. 4-04 set to d02 M0, M1 set at RUN/STOP and FWD/REV
73.02.87
B.8 Conduit Bracket BK-S
B-18
Fuse Specification Chart
B.9 Non-fuse Circuit Breaker Chart
B-20
Related Specification
Appendix C How to Select the Right AC Motor Drive
n T + n s k s − 1 = P C 1 ⎢ ⎢
C.1 Capacity Formulas
n T + I M ⎢1+
k ⋅ N
k ⋅ IM ≤ the rated current of AC motor drive A
Symbol explanation
k ⋅ 3 ⋅VM ⋅ IM ⋅10−3 ≤ the capacity of AC motor drivekVA
cosϕ
Parameter Settings Note
C.2 General Precautions
Selection Note
torque%
C.3 How to Choose a Suitable Motor
25% 40% 60% 100
continuous
Special motors
„ To avoid resonances, use the Skip frequencies
Motor torque
Power Transmission Mechanism
Motor