Epsilon Ei DeviceNet Drive Reference Manual
Master Send Assembly Block - Index Sel (Userdef)
Word | Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 | Bit 7 |
| Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 |
| Bit 0 | |
| Index | Index | Index | Index |
| DN Bit | DN Bit | DN Bit | DN Bit | DN Bit |
| DN Bit | DN Bit | DN Bit | DN Bit | DN Bit | DN Bit |
| DN Bit |
0 | Select | Select | Select | Select |
|
|
| ||||||||||||
| 11 MS | 10 MS | 9 MS | 8 MS | 7 MS |
| 6 MS | 5 MS | 4 MS | 3 MS | 2 MS | 1 MS |
| 0 MS | |||||
| Bit 3 | Bit 2 | Bit 1 | Bit 0 |
|
|
| ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 | Reserved | Reserved | Reserved |
| Output Word Select Data Pointer (See page 15) | Reserved |
| Reserved | Enable |
| Input Word Select Data Pointer (See page 14) |
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
| Data Low Word |
|
|
|
|
|
|
| LS Bit | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
3 | MS Bit |
|
|
|
|
|
|
|
| Data High Word |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
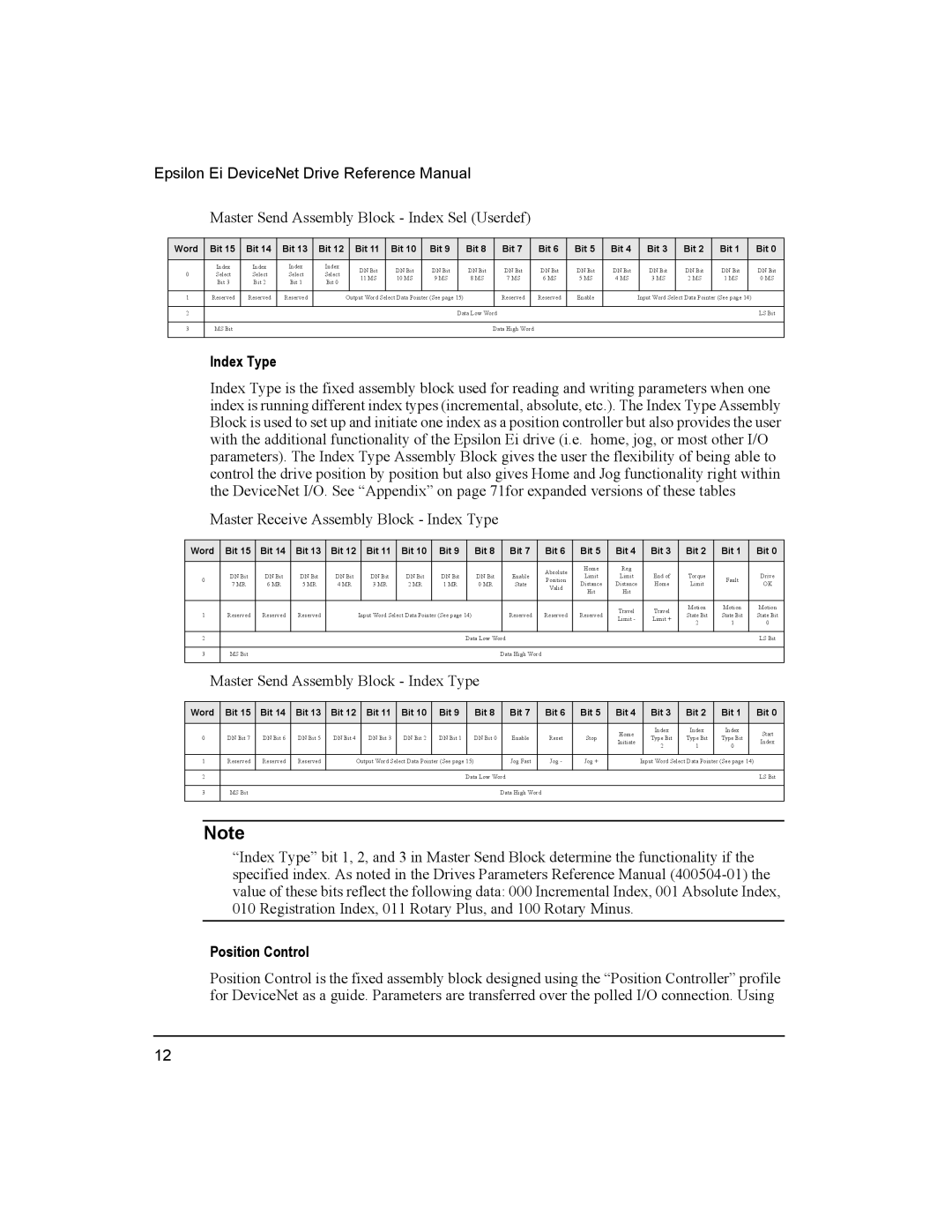
Index Type
Index Type is the fixed assembly block used for reading and writing parameters when one index is running different index types (incremental, absolute, etc.). The Index Type Assembly Block is used to set up and initiate one index as a position controller but also provides the user with the additional functionality of the Epsilon Ei drive (i.e. home, jog, or most other I/O parameters). The Index Type Assembly Block gives the user the flexibility of being able to control the drive position by position but also gives Home and Jog functionality right within the DeviceNet I/O. See “Appendix” on page 71for expanded versions of these tables
Master Receive Assembly Block - Index Type
Word | Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 | Bit 7 |
| Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
|
|
|
|
|
|
|
|
|
|
| Absolute | Home | Reg |
|
|
| Drive |
| DN Bit | DN Bit | DN Bit | DN Bit | DN Bit | DN Bit | DN Bit | DN Bit | Enable |
| Limit | Limit | End of | Torque | Fault | ||
0 |
| Position | |||||||||||||||
7 MR | 6 MR | 5 MR | 4 MR | 3 MR | 2 MR | 1 MR | 0 MR | State |
| Distance | Distance | Home | Limit | OK | |||
|
| Valid |
| ||||||||||||||
|
|
|
|
|
|
|
|
|
|
| Hit | Hit |
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Travel | Travel | Motion | Motion | Motion |
1 | Reserved | Reserved | Reserved |
| Input Word Select Data Pointer (See page 14) | Reserved |
| Reserved | Reserved | State Bit | State Bit | State Bit | |||||
|
| Limit - | Limit + | ||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| 2 | 1 | 0 | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
| Data Low Word |
|
|
|
|
|
| LS Bit | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
3 | MS Bit |
|
|
|
|
|
|
| Data High Word |
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Master Send Assembly Block - Index Type |
|
|
|
|
|
|
|
|
| ||||||||
Word | Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 | Bit 7 |
| Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 |
| Bit 0 |
|
|
|
|
|
|
|
|
|
|
|
|
| Home | Index | Index | Index |
| Start |
0 | DN Bit 7 | DN Bit 6 | DN Bit 5 | DN Bit 4 | DN Bit 3 | DN Bit 2 | DN Bit 1 | DN Bit 0 | Enable |
| Reset | Stop | Type Bit | Type Bit | Type Bit |
| ||
| Initiate |
| Index | |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
| 2 | 1 | 0 |
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 | Reserved | Reserved | Reserved |
| Output Word Select Data Pointer (See page 15) | Jog Fast |
| Jog - | Jog + |
| Input Word Select Data Pointer (See page 14) |
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
| Data Low Word |
|
|
|
|
|
|
| LS Bit | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
3 | MS Bit |
|
|
|
|
|
|
| Data High Word |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Note
“Index Type” bit 1, 2, and 3 in Master Send Block determine the functionality if the specified index. As noted in the Drives Parameters Reference Manual
Position Control
Position Control is the fixed assembly block designed using the “Position Controller” profile for DeviceNet as a guide. Parameters are transferred over the polled I/O connection. Using
12