Configuring the DeviceNet Network
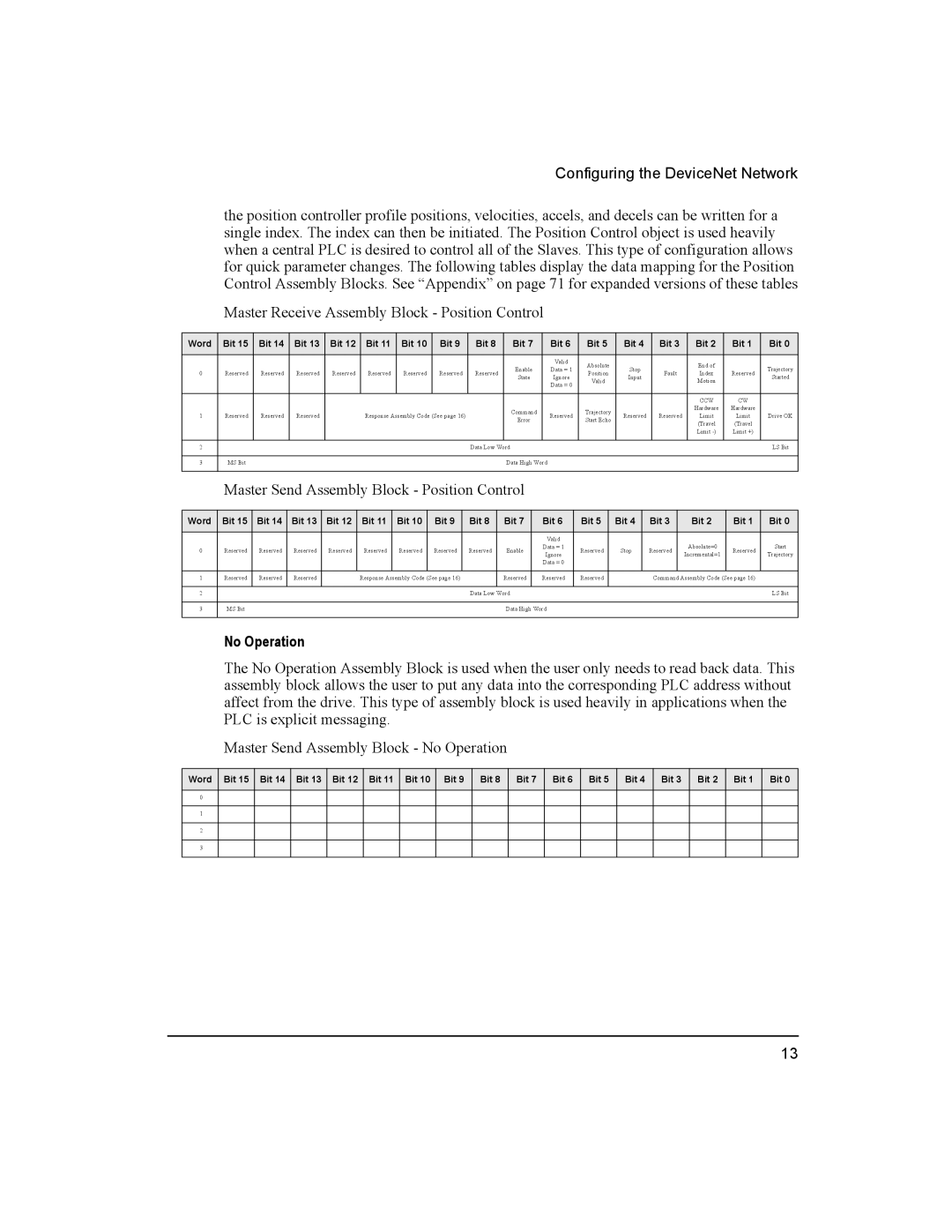
the position controller profile positions, velocities, accels, and decels can be written for a single index. The index can then be initiated. The Position Control object is used heavily when a central PLC is desired to control all of the Slaves. This type of configuration allows for quick parameter changes. The following tables display the data mapping for the Position Control Assembly Blocks. See “Appendix” on page 71 for expanded versions of these tables
Master Receive Assembly Block - Position Control
Word | Bit 15 | Bit 14 | Bit 13 | Bit 12 | Bit 11 | Bit 10 | Bit 9 | Bit 8 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Valid | Absolute | Stop |
|
| End of |
| Trajectory | ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| Enable | Data = 1 |
|
|
| |||||||||
0 | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Position | Fault | Index | Reserved | |||||||||||||||
State | Ignore | Input | Started | ||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| Valid |
|
| Motion |
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Data = 0 |
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| CCW | CW |
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Command |
|
| Trajectory |
|
|
|
| Hardware | Hardware |
| |||
1 | Reserved | Reserved | Reserved |
| Response Assembly Code (See page 16) |
|
| Reserved | Reserved | Reserved | Limit | Limit | Drive OK | ||||||||||||||
|
|
| Error | Start Echo | |||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| (Travel | (Travel |
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Limit | Limit +) |
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
2 |
|
|
|
|
|
|
|
|
|
|
| Data Low Word |
|
|
|
|
|
|
|
|
|
| LS Bit | ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
3 | MS Bit |
|
|
|
|
|
|
|
|
|
|
|
| Data High Word |
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| Master Send Assembly Block - Position Control |
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
Word | Bit 15 | Bit 14 | Bit 13 |
| Bit 12 | Bit 11 |
| Bit 10 |
| Bit 9 |
| Bit 8 |
| Bit 7 |
| Bit 6 |
| Bit 5 |
| Bit 4 |
| Bit 3 |
| Bit 2 | Bit 1 | Bit 0 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Valid |
|
|
|
|
|
|
| Absolute=0 |
| Start | |
0 | Reserved | Reserved | Reserved |
| Reserved | Reserved |
| Reserved |
| Reserved |
| Reserved |
| Enable |
| Data = 1 |
| Reserved |
| Stop |
| Reserved |
| Reserved | |||
|
|
|
|
|
| Ignore |
|
|
|
| Incremental=1 | Trajectory | |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Data = 0 |
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
1 | Reserved | Reserved | Reserved |
|
| Response Assembly Code (See page 16) |
|
| Reserved |
| Reserved |
| Reserved |
|
|
| Command Assembly Code (See page 16) |
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
2 |
|
|
|
|
|
|
|
|
|
|
| Data Low Word |
|
|
|
|
|
|
|
|
|
| LS Bit | ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
3 | MS Bit |
|
|
|
|
|
|
|
|
|
|
|
| Data High Word |
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
No Operation
The No Operation Assembly Block is used when the user only needs to read back data. This assembly block allows the user to put any data into the corresponding PLC address without affect from the drive. This type of assembly block is used heavily in applications when the PLC is explicit messaging.
Master Send Assembly Block - No Operation
Word Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 | Bit 8 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
|
|
|
|
|
|
|
|
|
|
0
1
2
3
13