Epsilon Ei DeviceNet Drive Reference Manual
11.Set Output Bit O:1.1/3 high to Jog
12.Set Output Bit O:1.1/4 high to enable Jog Fast.
13.Set Output Bits O:1.1/12 - O:1.1/15 to select the index to initiate or to select the index to read from or write to using the Input/Output Word Select Data Pointer.
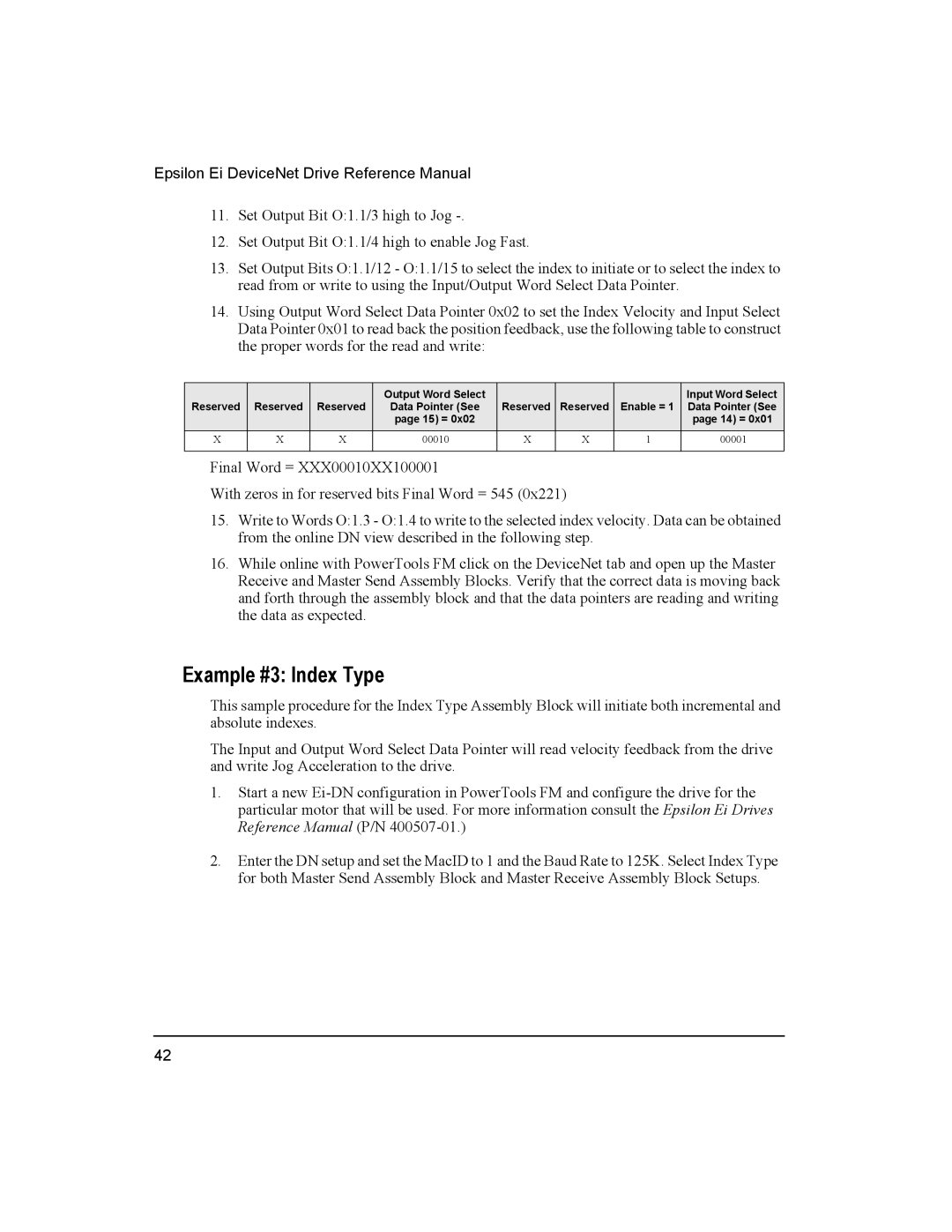
14.Using Output Word Select Data Pointer 0x02 to set the Index Velocity and Input Select Data Pointer 0x01 to read back the position feedback, use the following table to construct the proper words for the read and write:
|
|
| Output Word Select |
|
|
| Input Word Select |
Reserved | Reserved | Reserved | Data Pointer (See | Reserved | Reserved | Enable = 1 | Data Pointer (See |
|
|
| page 15) = 0x02 |
|
|
| page 14) = 0x01 |
X | X | X | 00010 | X | X | 1 | 00001 |
|
|
|
|
|
|
|
|
Final Word = XXX00010XX100001
With zeros in for reserved bits Final Word = 545 (0x221)
15.Write to Words O:1.3 - O:1.4 to write to the selected index velocity. Data can be obtained from the online DN view described in the following step.
16.While online with PowerTools FM click on the DeviceNet tab and open up the Master Receive and Master Send Assembly Blocks. Verify that the correct data is moving back and forth through the assembly block and that the data pointers are reading and writing the data as expected.
Example #3: Index Type
This sample procedure for the Index Type Assembly Block will initiate both incremental and absolute indexes.
The Input and Output Word Select Data Pointer will read velocity feedback from the drive and write Jog Acceleration to the drive.
1.Start a new
2.Enter the DN setup and set the MacID to 1 and the Baud Rate to 125K. Select Index Type for both Master Send Assembly Block and Master Receive Assembly Block Setups.
42