Epsilon Ei DeviceNet Drive Reference Manual
5.Download this file to the
6.Proceed to “Master Configuration” on page 48 before going any farther with this example. After configuring the master return to this point and continue.
While online with the
7.Set Output Bit O:1.1/7 high to software enable the drive.
8.Set Output Bit O:1.1/1 high to indicate an incremental index.
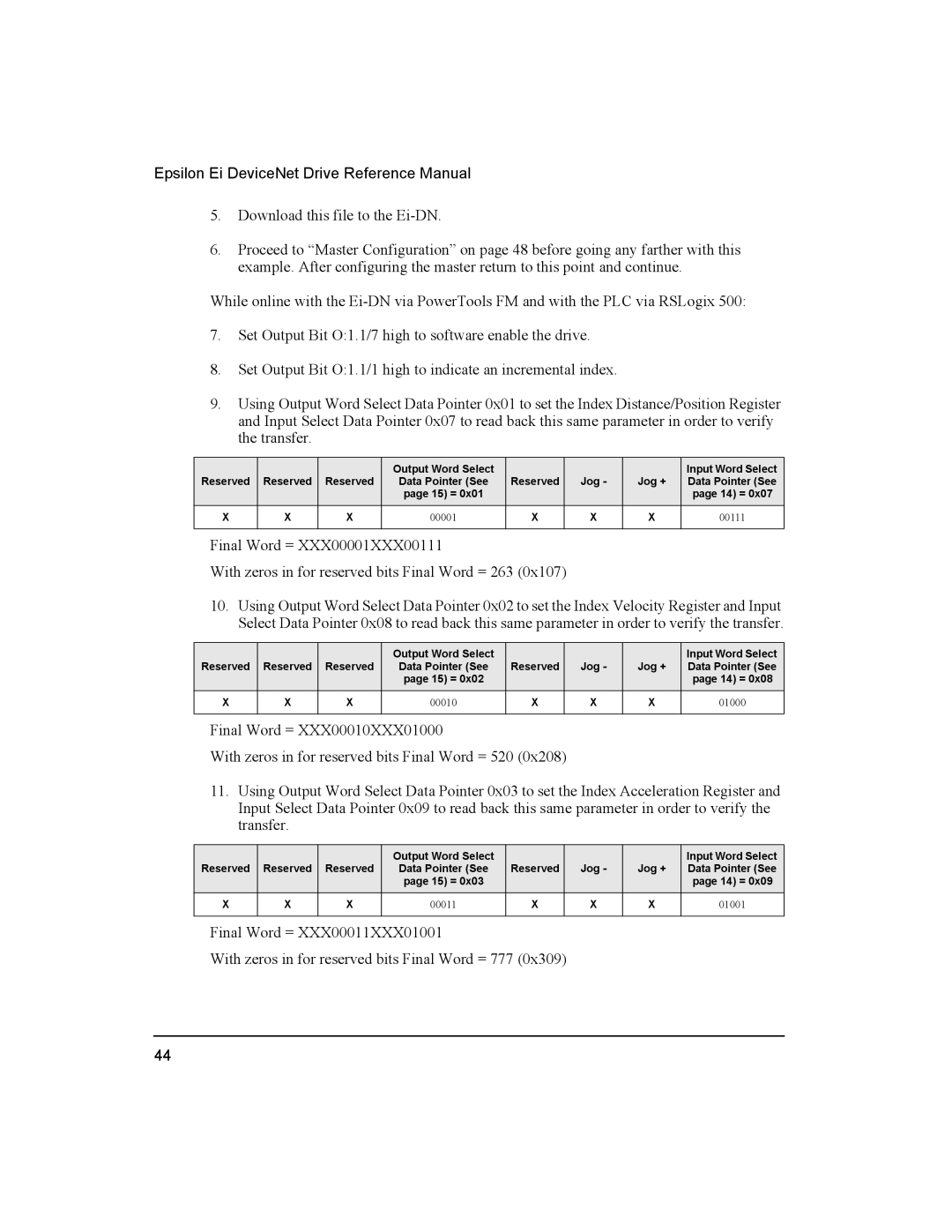
9.Using Output Word Select Data Pointer 0x01 to set the Index Distance/Position Register and Input Select Data Pointer 0x07 to read back this same parameter in order to verify the transfer.
|
|
| Output Word Select |
|
|
| Input Word Select |
Reserved | Reserved | Reserved | Data Pointer (See | Reserved | Jog - | Jog + | Data Pointer (See |
|
|
| page 15) = 0x01 |
|
|
| page 14) = 0x07 |
X | X | X | 00001 | X | X | X | 00111 |
|
|
|
|
|
|
|
|
Final Word = XXX00001XXX00111
With zeros in for reserved bits Final Word = 263 (0x107)
10.Using Output Word Select Data Pointer 0x02 to set the Index Velocity Register and Input Select Data Pointer 0x08 to read back this same parameter in order to verify the transfer.
Reserved | Reserved | Reserved | Output Word Select | Reserved | Jog - | Jog + | Input Word Select |
Data Pointer (See | Data Pointer (See | ||||||
|
|
| page 15) = 0x02 |
|
|
| page 14) = 0x08 |
X | X | X | 00010 | X | X | X | 01000 |
|
|
|
|
|
|
|
|
Final Word = XXX00010XXX01000
With zeros in for reserved bits Final Word = 520 (0x208)
11.Using Output Word Select Data Pointer 0x03 to set the Index Acceleration Register and Input Select Data Pointer 0x09 to read back this same parameter in order to verify the transfer.
|
|
| Output Word Select |
|
|
| Input Word Select |
Reserved | Reserved | Reserved | Data Pointer (See | Reserved | Jog - | Jog + | Data Pointer (See |
|
|
| page 15) = 0x03 |
|
|
| page 14) = 0x09 |
X | X | X | 00011 | X | X | X | 01001 |
|
|
|
|
|
|
|
|
Final Word = XXX00011XXX01001
With zeros in for reserved bits Final Word = 777 (0x309)
44