Network Configuration Quick Start
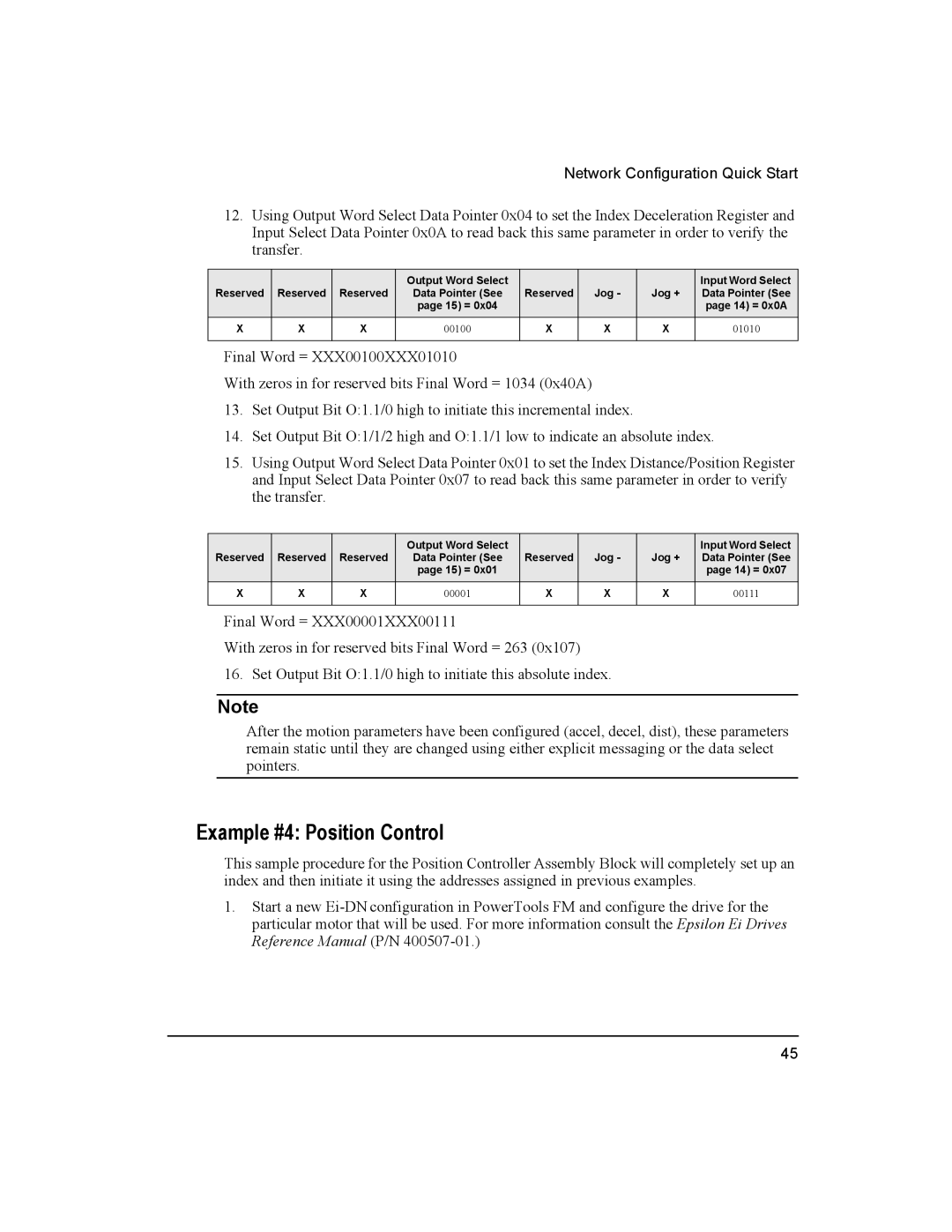
12.Using Output Word Select Data Pointer 0x04 to set the Index Deceleration Register and Input Select Data Pointer 0x0A to read back this same parameter in order to verify the transfer.
Reserved | Reserved | Reserved | Output Word Select | Reserved | Jog - | Jog + | Input Word Select |
Data Pointer (See | Data Pointer (See | ||||||
|
|
| page 15) = 0x04 |
|
|
| page 14) = 0x0A |
X | X | X | 00100 | X | X | X | 01010 |
|
|
|
|
|
|
|
|
Final Word = XXX00100XXX01010
With zeros in for reserved bits Final Word = 1034 (0x40A)
13.Set Output Bit O:1.1/0 high to initiate this incremental index.
14.Set Output Bit O:1/1/2 high and O:1.1/1 low to indicate an absolute index.
15.Using Output Word Select Data Pointer 0x01 to set the Index Distance/Position Register and Input Select Data Pointer 0x07 to read back this same parameter in order to verify the transfer.
Reserved | Reserved | Reserved | Output Word Select | Reserved | Jog - | Jog + | Input Word Select |
Data Pointer (See | Data Pointer (See | ||||||
|
|
| page 15) = 0x01 |
|
|
| page 14) = 0x07 |
X | X | X | 00001 | X | X | X | 00111 |
|
|
|
|
|
|
|
|
Final Word = XXX00001XXX00111
With zeros in for reserved bits Final Word = 263 (0x107)
16. Set Output Bit O:1.1/0 high to initiate this absolute index.
Note
After the motion parameters have been configured (accel, decel, dist), these parameters remain static until they are changed using either explicit messaging or the data select pointers.
Example #4: Position Control
This sample procedure for the Position Controller Assembly Block will completely set up an index and then initiate it using the addresses assigned in previous examples.
1.Start a new
45