Setup & Operation 2. Specifications
| 2.4 |
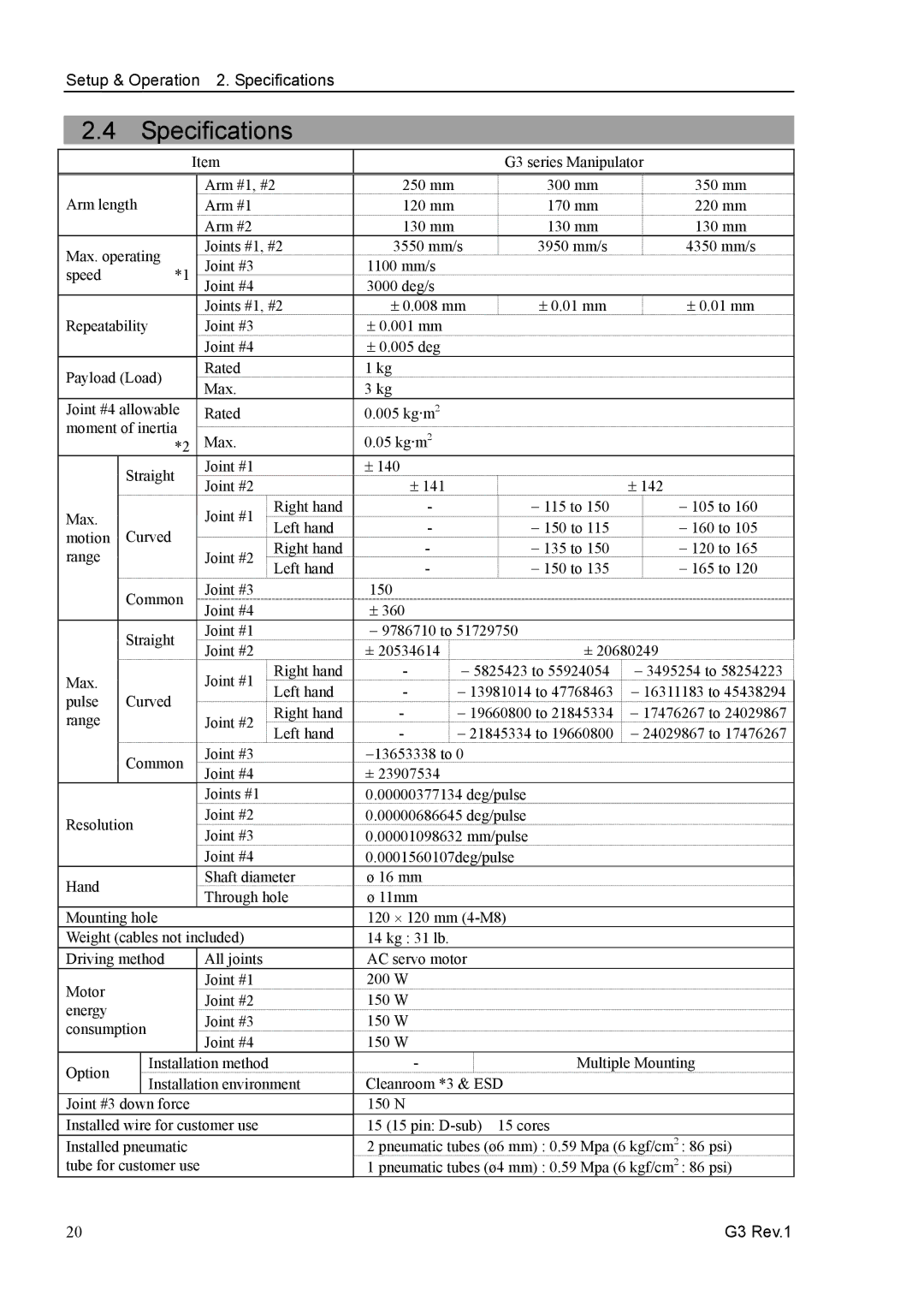
| Specifications |
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
| Item |
|
|
|
| G3 series Manipulator | |||
| Arm length |
| Arm #1, #2 | 250 mm |
|
| 300 mm |
| 350 mm | |||
|
| Arm #1 |
| 120 mm |
|
| 170 mm |
| 220 mm | |||
|
|
|
|
| Arm #2 |
| 130 mm |
|
| 130 mm |
| 130 mm |
| Max. operating |
| Joints #1, #2 | 3550 mm/s |
| 3950 mm/s |
| 4350 mm/s | ||||
|
| Joint #3 |
| 1100 mm/s |
|
|
|
|
| |||
| speed | *1 |
|
|
|
|
|
|
| |||
|
|
|
|
|
|
| ||||||
|
|
|
|
| Joint #4 |
| 3000 deg/s |
|
|
|
|
|
|
|
|
|
| Joints #1, #2 | ± 0.008 mm |
| ± 0.01 mm |
| ± 0.01 mm | ||
| Repeatability |
| Joint #3 |
| ± 0.001 mm |
|
|
|
|
| ||
|
|
|
|
| Joint #4 |
| ± 0.005 deg |
|
|
|
|
|
| Payload (Load) |
| Rated |
| 1 kg |
|
|
|
|
| ||
|
| Max. |
| 3 kg |
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
| ||
| Joint #4 allowable |
| Rated |
| 0.005 kg·m2 |
|
|
|
|
| ||
| moment of inertia |
| Max. |
| 0.05 kg·m2 |
|
|
|
|
| ||
|
|
|
|
|
|
|
| |||||
|
| *2 |
|
|
|
|
|
|
| |||
|
| Straight |
| Joint #1 |
| ± 140 |
|
|
|
|
| |
|
|
| Joint #2 |
| ± 141 |
|
|
| ± 142 | |||
|
|
|
|
|
|
|
|
| ||||
| Max. |
|
|
| Joint #1 | Right hand | - |
|
| − 115 to 150 |
| − 105 to 160 |
| Curved |
| Left hand | - |
|
| − 150 to 115 |
| − 160 to 105 | |||
| motion |
|
|
|
|
| ||||||
|
|
| Right hand | - |
|
| − 135 to 150 |
| − 120 to 165 | |||
| range |
|
|
| Joint #2 |
|
|
| ||||
|
|
|
| Left hand | - |
|
| − 150 to 135 |
| − 165 to 120 | ||
|
|
|
|
|
|
|
|
| ||||
|
| Common |
| Joint #3 |
| 150 |
|
|
|
|
| |
|
|
| Joint #4 |
| ± 360 |
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
| ||
|
| Straight |
| Joint #1 |
| − 9786710 to 51729750 |
|
| ||||
|
|
| Joint #2 |
| ± 20534614 |
| ± 20680249 | |||||
|
|
|
|
|
|
| ||||||
| Max. |
|
|
| Joint #1 | Right hand | - | − 5825423 to 55924054 | − 3495254 to 58254223 | |||
| Curved |
| Left hand | - | − 13981014 to 47768463 | − 16311183 to 45438294 | ||||||
| pulse |
|
| |||||||||
|
|
| Right hand | - | − 19660800 to 21845334 | − 17476267 to 24029867 | ||||||
| range |
|
|
| Joint #2 | |||||||
|
|
|
| Left hand | - | − 21845334 to 19660800 | − 24029867 to 17476267 | |||||
|
|
|
|
|
| |||||||
|
| Common |
| Joint #3 |
| −13653338 to 0 |
|
|
|
| ||
|
|
| Joint #4 |
| ± 23907534 |
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
| Joints #1 |
| 0.00000377134 deg/pulse |
|
| |||
| Resolution |
| Joint #2 |
| 0.00000686645 deg/pulse |
|
| |||||
|
| Joint #3 |
| 0.00001098632 mm/pulse |
|
| ||||||
|
|
|
|
|
|
|
| |||||
|
|
|
|
| Joint #4 |
| 0.0001560107deg/pulse |
|
| |||
| Hand |
|
|
| Shaft diameter | ø 16 mm |
|
|
|
|
| |
|
|
|
| Through hole | ø 11mm |
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
| |||
| Mounting hole |
|
|
| 120 ⋅ 120 mm |
|
| |||||
| Weight (cables not included) |
| 14 kg : 31 lb. |
|
|
|
|
| ||||
| Driving method |
| All joints |
| AC servo motor |
|
|
|
| |||
| Motor |
|
|
| Joint #1 |
| 200 W |
|
|
|
|
|
|
|
|
| Joint #2 |
| 150 W |
|
|
|
|
| |
| energy |
|
|
|
|
|
|
|
|
| ||
|
|
|
| Joint #3 |
| 150 W |
|
|
|
|
| |
| consumption |
|
|
|
|
|
|
| ||||
|
| Joint #4 |
| 150 W |
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
| ||
| Option |
| Installation method |
| - |
|
| Multiple Mounting | ||||
|
| Installation environment | Cleanroom *3 & ESD |
|
| |||||||
|
|
|
|
| ||||||||
| Joint #3 down force |
|
|
| 150 N |
|
|
|
|
| ||
| Installed wire for customer use |
| 15 (15 pin: | 15 cores |
|
| ||||||
| Installed pneumatic |
|
|
| 2 pneumatic tubes (ø6 mm) : 0.59 Mpa (6 kgf/cm2 : 86 psi) | |||||||
| tube for customer use |
| 1 pneumatic tubes (ø4 mm) : 0.59 Mpa (6 kgf/cm2 : 86 psi) | |||||||||
20 | G3 Rev.1 |