Design Guide
Intel 440GX AGPset
Intel440GX AGPset Design Guide
Contents
System Bus Clock Layout 6.3
Dimm Solution With FET Switches
6.4
6.5
ISA and X-Bus Signals
PIIX4E Power And Ground Pins
Thermals / Cooling Solutions 20.1
82371EB PIIX4E
FET Switches4 DIMM/FET Design
IntelPentiumII Processor LAI Issue
Voltage Regulator Control Silicon
Intel440GX AGPset Platform Reference Design
Example NLX Placement for a UP Intel Pentium II processor
Example ATX Placement for a UP Pentium II processor
Solution Space for Single Processor Design Based on Results
Solution Space for Single Processor Designs With Single-End
Intel Pentium II Processor and Intel 440GX AGPset
Tables
Intel Pentium II Processor and Intel 440GX AGPset 100 MHz
Motherboard Model MAB12,11,90#, MAB14,13,10, 4 DIMMs
Date Revision Description
Revision History
Intel440GX AGPset Design Guide
Introduction
Page
About This Design Guide
Introduction
References
Intel Pentium II Processor
Intel Pentium II Processor / Intel 440GX AGPset Overview
VCR
Intel 440GX AGPset
Accelerated Graphics Port Interface
System Bus Interface
Dram Interface
PCI-to-ISA/IDE Xcelerator PIIX4E
Wired for Management Initiative
PCI Interface
System Clocking
Instrumentation
Remote Service Boot
Design Recommendations
Power Management
Voltage Definitions
Remote Wake-Up
General Design Recommendations
Introduction
Motherboard Design
Page
BGA Quadrant Assignment
Major Signal Sections 82443GX Top View
ATX Form Factor
NLX Form Factor
Board Description
Four Layer Board Stack-up
Routing Guidelines
2 GTL+ Layout Recommendations
1 GTL+ Description
Single Processor Design
Single Processor Network Topology and Conditions
Trace Minimum Length Maximum Length
Single Processor Recommended Trace Lengths
Recommended Trace Lengths for Single Processor Design
Single Processor Systems-Single-End Termination SET
Dual Processor Systems
Dual Processor Network Topology and Conditions
Dual Processor Recommended Trace Lengths
SET Trace Length Requirements
SET Trace Length Requirements
Practical Considerations
Additional Guidelines
Minimizing Crosstalk
Design Methodology
12. GTL+ Design Process
Performance Requirements
Pre-Layout Simulation Sensitivity Analysis
Topology Definition
Simulation Methodology
Recommended 100 MHz System Flight Time Specs
Post-Layout Simulation
Placement & Layout
Flight Time Measurement
Crosstalk and the Multi-Bit Adjustment Factor
Validation
Edge Guideline @ Processor Edge Spec @ Processor Core
Signal Quality Measurement
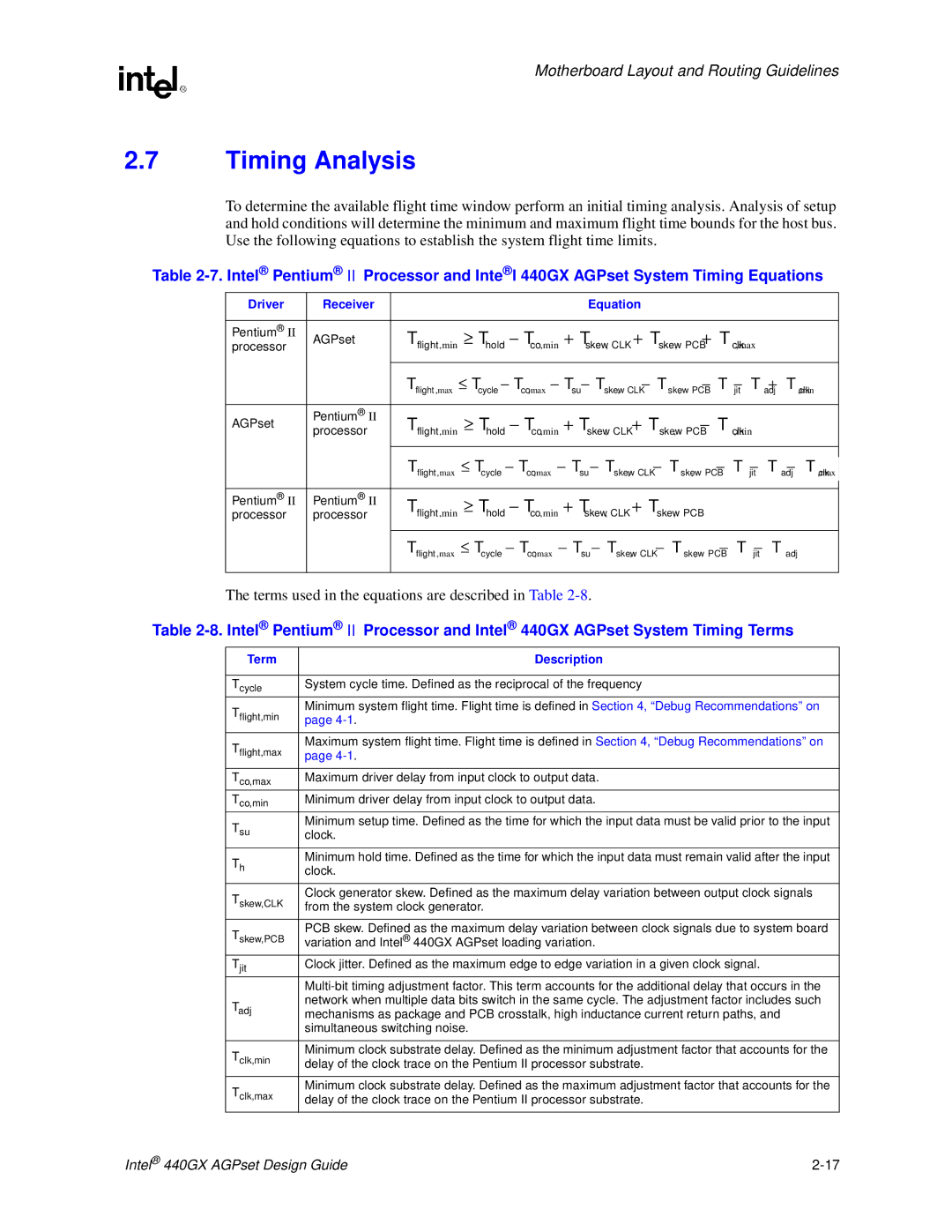
Term Description
Timing Analysis
11. Recommended 100 MHz System Flight Time Specs
10. Recommended 100 MHz System Timing Parameters
Timing Term Intel Pentium II Processor Intel 440GX AGPset
Timing Term Value
Connector
AGP Connector Up Option Layout Guidelines
AGP Layout and Routing Guidelines
12. Data and Associated Strobe
On-board AGP Compliant Device Down Option Layout Guidelines
14. Control Signal Line Length Recommendations
13. Source Synchronous Motherboard Recommendations
WidthSpace Trace Line Length Line Length Matching
15. Source Synchronous Motherboard Recommendations
16. Control Signal Line Length Recommendations
Compliant 82443GX Graphics Data Routing Device
To 82443GX MDs & MECCs To DIMM10 DQs To DIMM32 DQs
82443GX Memory Subsystem Layout and Routing Guidelines
1 100 MHz 82443GX Memory Array Considerations
Adding Additional Decoupling Capacitor
Matching the Reference Planes
Register
Register Data Control Clock
Trace Width vs. Trace Spacing
Memory Layout & Routing Guidelines
Switch 16212 Dimm Module
18. FET Switch DQ Route Example
82443GX Dimm Module
82443GX 0.6 0.4 0.6 0.4 Dimm Module
24. Motherboard Model-DQMB1,5, 4 DIMMs
21. Motherboard Model SCASB#, 4 DIMMs
19. Motherboard Model SRASB#, 4 DIMMs
20. Motherboard Model SCASA#, 4 DIMMs
24. Motherboard Model MAA140, 4 DIMMs
22. Motherboard Model WEA#, 4 DIMMs
23. Motherboard Model WEB#, 4 DIMMs
PCI Bus Routing Guidelines
3 4 Dimm Routing Guidelines no FET
25. Motherboard Model MAB12,11,90#, MAB14,13,10, 4 DIMMs
VCC3
Host Bridge Controller 492 BGA
Decoupling Guidelines Intel 440GX AGPset Platform
Clock Routing Spacing
Intel 440GX AGPset Clock Layout Recommendations
System Bus Clock Layout
014 018 Clock
Sdram Clock Layout
PCI Clock Layout
Net Trace Length Min Max Cap
440GX Ckbf Dlko
Net Trace Length Min Max Card Trace
AGP Clock Layout
Design Checklist
Page
Pull-up and Pull-down Resistor Values
Overview
Processor Pin Pin Connection
Intel Pentium II Processor Checklist
Slot Connectivity Sheet 1
Slot Connectivity Sheet 2
Vtt VCC3 Reserved NC Vcc
GND & Power Pin Definition
Slot Connectivity Sheet 3
Intel Pentium II Processor Clocks
Intel Pentium II Processor Signals
Design Checklist
Dual-Processor DP Slot 1 Checklist
Uni-Processor UP Slot 1 Checklist
Slot 1 Decoupling Capacitors
Voltage Regulator Module, VRM
1 CK100 100 MHz Clock Synthesizer
Intel 440GX AGPset Clocks
Processor Frequency Select
SEL100/66#
Gcke and Dclkwr Connection
Ckbf Sdram 1 to 18 Clock Buffer
GX Connectivity Sheet 1
82443GX Host Bridge
1 82443GX Interface
GX Connectivity Sheet 2
3 82443GX PCI Interface
2 82443GX GTL+ Bus Interface
GX Connectivity Sheet 3
VTTA, Vttb
Strapping Options
Signal Description Register Pulled to ‘0’ Pulled to ‘1’
4 82443GX AGP Interface
Intel 440GX AGPset Memory Interface
82443GX Pins/Connection Dimm Pins Pin Function
Sdram Connections
Sdram Connectivity
Registered Sdram
Dimm Solution With FET Switches
82371EB PIIX4E
Signal Names Connection
PIIX4E Connections
PIIX4E Connectivity Sheet 1
PIIX4E Connectivity Sheet 2
PIIX4E Connectivity Sheet 3
PIIX4E Connectivity Sheet 4
IDE Routing Guidelines
Signal Resistor
Cabling
Motherboard
PDD150 PDA20
Reset#
Pin32,34
IDE
PIIX4E PWR & GND
PCI Bus Signals
PIIX4E Power And Ground Pins
ISA and X-Bus Signals
ISA Signals
10. Non-PIIX4E PCI Signals
11. Non-PIIX4E ISA Signals
12. Non-PIIX4E IDE
USB Interface
IDE Interface
Dual-Footprint Flash Design
Flash Design
Flash Design Considerations
PLCC32 to TSOP40 PLCC32 to PSOP44 PDIP32 to TDIP40
XD70
Write Protection
13. Flash Vpp Recommendations
Power Management Signals
System and Test Signals
VCC3
Power Button Implementation
Miscellaneous
17 82093AA Ioapic
18.2 LM79 Microprocessor System Hardware Monitor
18.1 Max1617 Temperature Sensor
Manageability Devices
Required in both a and B stepping designs
18.3 82558B LOM Checklist
Pin Number Pin Name Resistor Value Comment
Wake On LAN WOL Header
Software/BIOS
USB and Multi-processor Bios
Design Considerations
Thermals / Cooling Solutions
Mechanicals
Electricals
Applications and Add-in Hardware
Layout Checklist
Routing and Board Fabrication
Design Consideration
Debug Recommendations
Page
Debug/Simulation Tools
Slot 1 Test Tools
Logic Analyzer Interface LAI
In-Target Probe ITP
Intel Pentium II Processor LAI Issue
Debug Features
Bus Functional Model BFM
4 I/O Buffer Models
Kohm
150 330 ohm
430 ohm
150 ohm
PICD0# 150 ohm PICD1#
Debug Logic Recommendations
A20M# 150 330 ohm
Debug Layout
Debug Procedures
Debug Considerations
Design Considerations
Debug Recommendations
Third Party Vendors
Page
Processors
Slot 1 Connector
GTL+ Bus Slot 1 Terminator Cards
Supplier Contact Phone
Voltage Regulator Control Silicon
Voltage Regulator Modules
Voltage Regulator Modules
Voltage Regulator Control Silicon Vendors
FET Switches4 DIMM/FET Design
Power Management Components
Intel 440GX AGPset
Clock Drivers
Other Processor Components
Reference Design Schematics
Page
Intel 440GX AGPset Platform Reference Design
82443GX Component System bus and Dram Interfaces
VRM
Power Connectors Front Panel Jumpers