MENU FUNCTIONS
Cutting time
If the mowing results are not optimal when using the Weather timer, Cutting time settings may need adjusting.
To adjust the Cutting time: place the cursor by Cutting time and use the right and left arrow keys to increase or decrease the cutting time in three preset intervals.
The longer cutting time that is chosen, the longer the robotic lawnmower will be allowed to work.
6.8 Installation
This menu function is used to steer the robotic lawnmower to remote parts of a working area and control how the robotic lawnmower searches for the charging station. For
many working areas there is no need to alter the factoryInstallation settings i.e. allow the robotic lawnmower itself to combine
the various search methods and the underlying settings.
Finding the charging station
The robotic lawnmower can be set to search for the charging station in one or more of the following three ways: Guide, Boundary loop and Charging station. The factory settings are that these three search options are automatically combined to find the charging station as quickly as possible but also with a minimum risk of tracks forming.
In very complex gardens e.g. with many areas joined by narrow passages, the amount of time required to find the charging station is decreased by carrying out a number of the manual setting outlined below.
The robotic lawnmower always starts the search for the charging station using an irregular search method.
When the robotic lawnmower still cannot find the charging station after a specific period of irregular searching, it also starts to search for the guide wires and after a further period also the boundary wire to follow one of them into the charging station instead. This time is specified in minutes and is known as delay time.
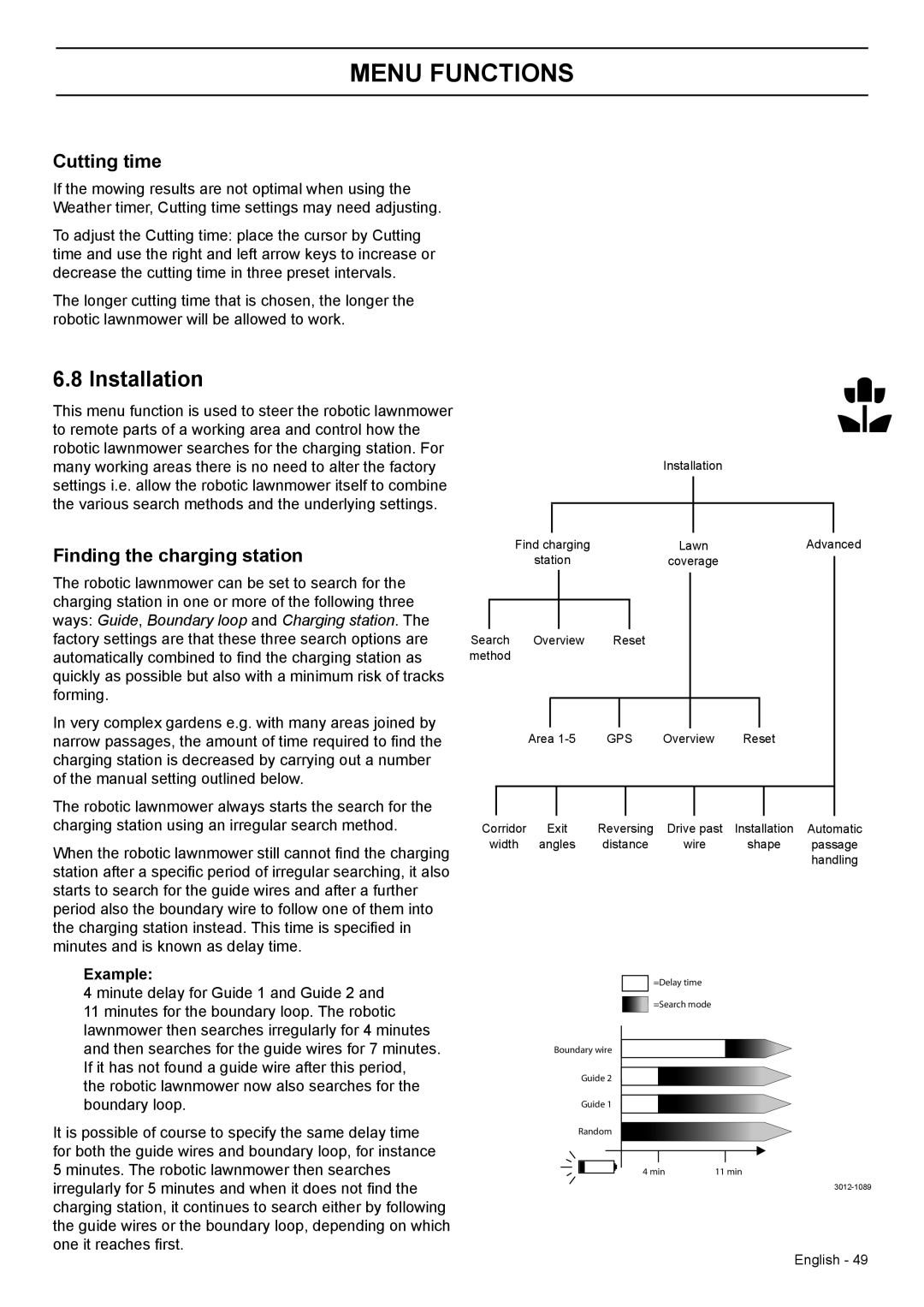
Example:
4 minute delay for Guide 1 and Guide 2 and
11 minutes for the boundary loop. The robotic lawnmower then searches irregularly for 4 minutes and then searches for the guide wires for 7 minutes. If it has not found a guide wire after this period, the robotic lawnmower now also searches for the boundary loop.
It is possible of course to specify the same delay time for both the guide wires and boundary loop, for instance 5 minutes. The robotic lawnmower then searches irregularly for 5 minutes and when it does not find the charging station, it continues to search either by following the guide wires or the boundary loop, depending on which one it reaches first.
Find charging | Lawn | Advanced |
station | coverage |
|
Search Overview Reset method
Area | GPS | Overview | Reset |
Corridor | Exit | Reversing | Drive past | Installation | Automatic |
width | angles | distance | wire | shape | passage |
|
|
|
|
| handling |
![]() =Delay time =Search mode
=Delay time =Search mode
Boundary wire
Guide 2
Guide 1
Random
4 min | 11 min |
English - 49