PRESENTATION
The STOP button on the top of the robotic lawnmower is mainly used to stop the robotic lawnmower when it’s running. When the STOP button is pressed a hatch opens, behind which there is a control panel. The STOP button remains pressed in until the hatch is closed again. This together with the START button acts as a start inhibitor.
The control panel on the top of the robotic lawnmower is where you manage all the robotic lawnmower settings.
When the main switch is set to 1 for the first time,
Movement pattern
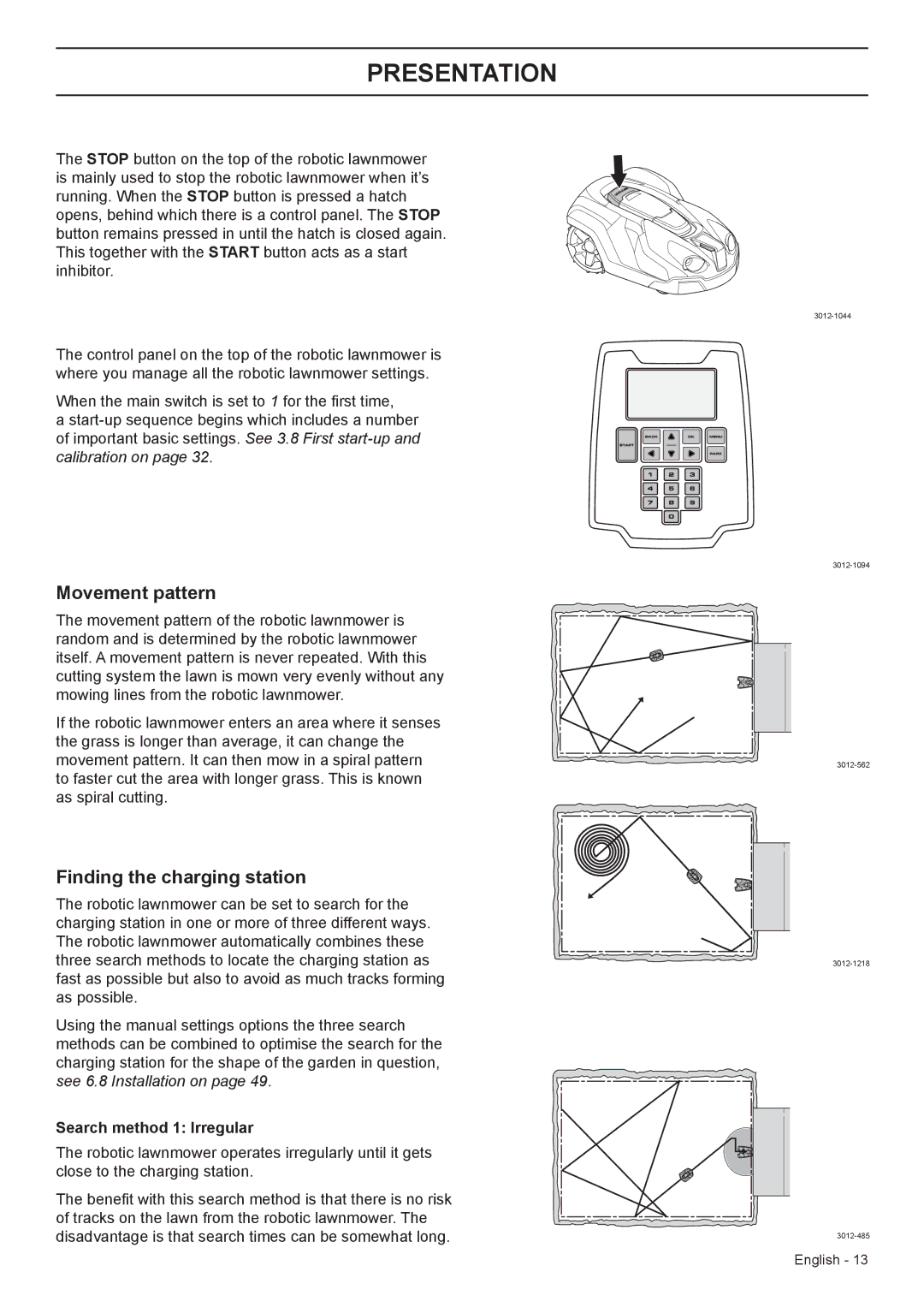
The movement pattern of the robotic lawnmower is random and is determined by the robotic lawnmower itself. A movement pattern is never repeated. With this cutting system the lawn is mown very evenly without any mowing lines from the robotic lawnmower.
If the robotic lawnmower enters an area where it senses the grass is longer than average, it can change the movement pattern. It can then mow in a spiral pattern to faster cut the area with longer grass. This is known as spiral cutting.
Finding the charging station
The robotic lawnmower can be set to search for the charging station in one or more of three different ways. The robotic lawnmower automatically combines these three search methods to locate the charging station as fast as possible but also to avoid as much tracks forming as possible.
Using the manual settings options the three search methods can be combined to optimise the search for the charging station for the shape of the garden in question, see 6.8 Installation on page 49.
Search method 1: Irregular
The robotic lawnmower operates irregularly until it gets close to the charging station.
The benefit with this search method is that there is no risk of tracks on the lawn from the robotic lawnmower. The disadvantage is that search times can be somewhat long.
English - 13