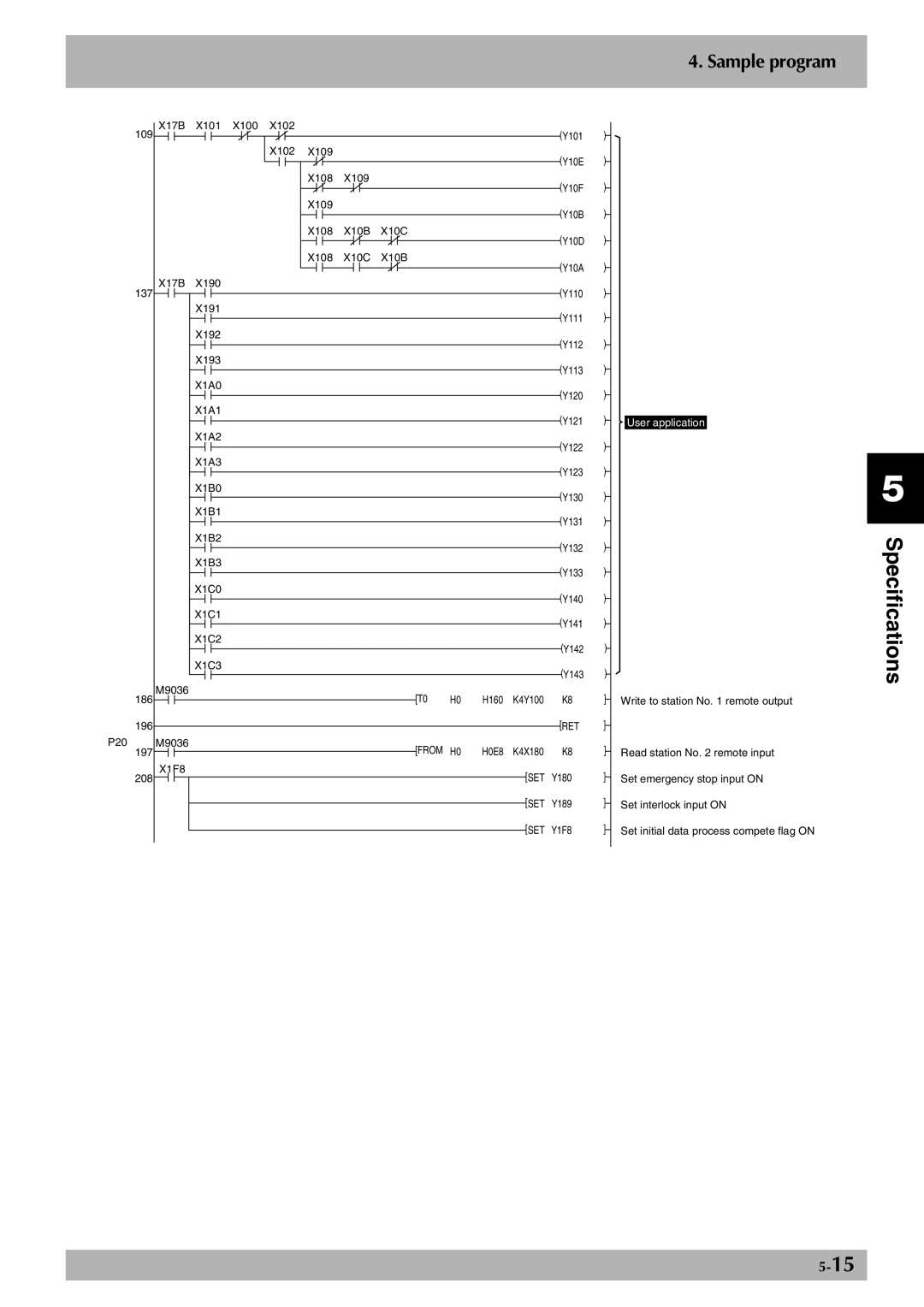
4. Sample program
X17B X101 X100 X102
109
X102
X17B X190 137 ![]()
![]()
![]()
![]()
X191
X192
X193
X1A0
X1A1
X1A2
X1A3
X1B0
X1B1
X1B2
X1B3
X1C0
X1C1
X1C2
X1C3
M9036
186
196
P20 M9036
197
X1F8
208
(Y101
X109
(Y10E
X108 X109
(Y10F
X109
(Y10B
X108 X10B X10C
(Y10D
X108 X10C X10B
(Y10A
(Y110
(Y111
(Y112
(Y113
(Y120
(Y121
(Y122
(Y123
(Y130
(Y131
(Y132
(Y133
(Y140
(Y141 (Y142
(Y143
[T0 | H0 | H160 | K4Y100 | K8 |
[RET
[FROM H0 | H0E8 K4X180 | K8 |
[SET Y180
[SET Y189 [SET Y1F8
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
]
]
]
]
]
]
User application
Write to station No. 1 remote output
Read station No. 2 remote input
Set emergency stop input ON
Set interlock input ON
Set initial data process compete flag ON
5
Specifications