2. Details of remote input/output signals
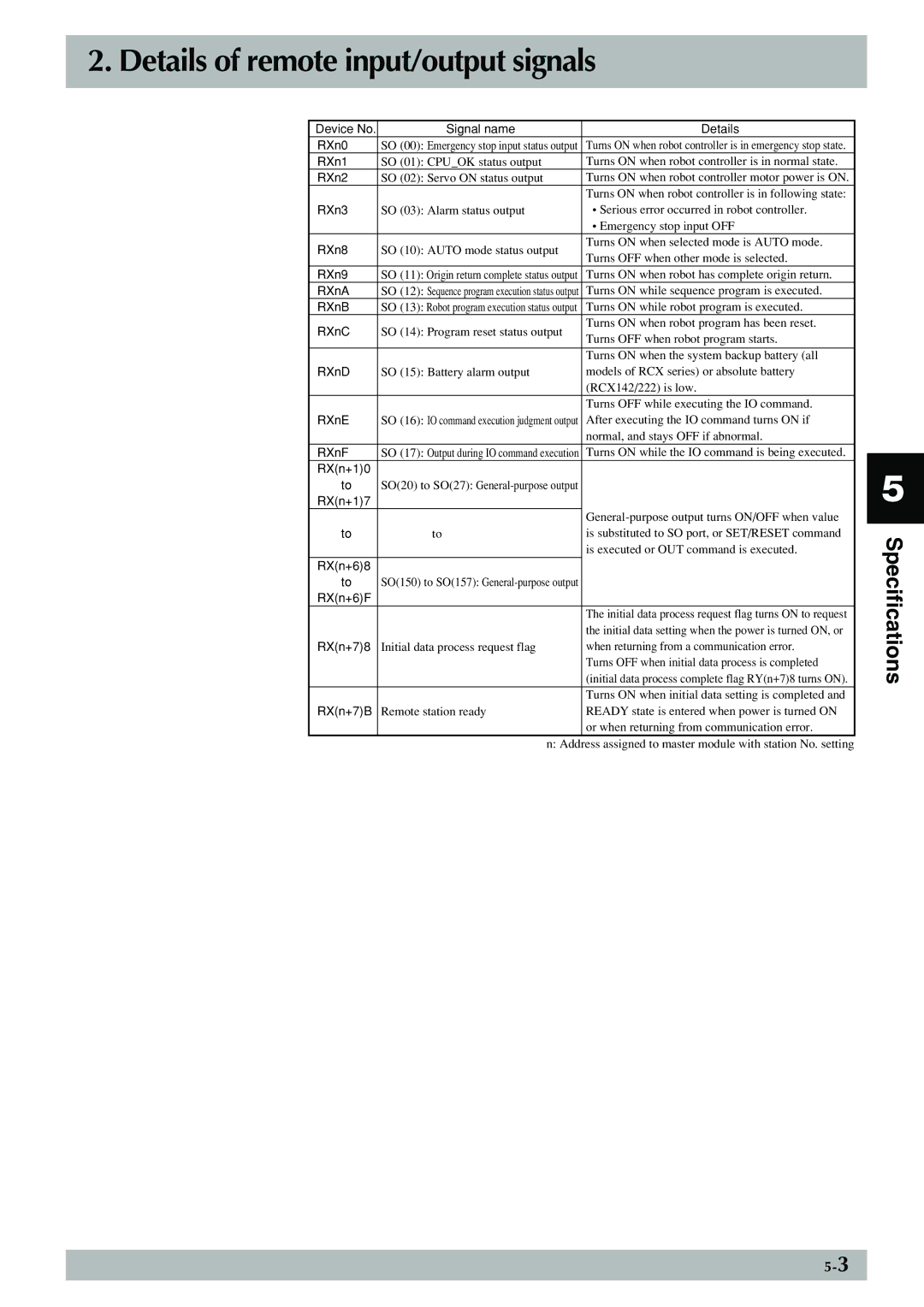
Device No. | Signal name | Details | |
RXn0 | SO (00): Emergency stop input status output | Turns ON when robot controller is in emergency stop state. | |
RXn1 | SO (01): CPU_OK status output | Turns ON when robot controller is in normal state. | |
RXn2 | SO (02): Servo ON status output | Turns ON when robot controller motor power is ON. | |
|
| Turns ON when robot controller is in following state: | |
RXn3 | SO (03): Alarm status output | • Serious error occurred in robot controller. | |
|
| • Emergency stop input OFF | |
RXn8 | SO (10): AUTO mode status output | Turns ON when selected mode is AUTO mode. | |
Turns OFF when other mode is selected. | |||
|
| ||
RXn9 | SO (11): Origin return complete status output | Turns ON when robot has complete origin return. | |
RXnA | SO (12): Sequence program execution status output | Turns ON while sequence program is executed. | |
RXnB | SO (13): Robot program execution status output | Turns ON while robot program is executed. | |
RXnC | SO (14): Program reset status output | Turns ON when robot program has been reset. | |
Turns OFF when robot program starts. | |||
|
| ||
|
|
| |
|
| Turns ON when the system backup battery (all | |
RXnD | SO (15): Battery alarm output | models of RCX series) or absolute battery | |
|
| (RCX142/222) is low. | |
|
| Turns OFF while executing the IO command. | |
RXnE | SO (16): IO command execution judgment output | After executing the IO command turns ON if | |
|
| normal, and stays OFF if abnormal. | |
RXnF | SO (17): Output during IO command execution | Turns ON while the IO command is being executed. | |
RX(n+1)0 |
|
| |
to | SO(20) to SO(27): |
| |
RX(n+1)7 |
|
| |
|
| ||
to | to | is substituted to SO port, or SET/RESET command | |
|
| is executed or OUT command is executed. | |
RX(n+6)8 |
|
| |
to | SO(150) to SO(157): |
| |
RX(n+6)F |
|
| |
|
| The initial data process request flag turns ON to request | |
|
| the initial data setting when the power is turned ON, or | |
RX(n+7)8 | Initial data process request flag | when returning from a communication error. | |
|
| Turns OFF when initial data process is completed | |
|
| (initial data process complete flag RY(n+7)8 turns ON). | |
|
| Turns ON when initial data setting is completed and | |
RX(n+7)B | Remote station ready | READY state is entered when power is turned ON | |
|
| or when returning from communication error. | |
| n: Address assigned to master module with station No. setting | ||
5
Specifications