4. Assignment of CC-Link compatible I/O
1
Outline
n NOTE
SIW(n) and SOW(n) are handled as numerical data of word with no sign. SID(n) and SOD(n) are handled as numerical data of double words with a sign.
n NOTE
The dedicated input of the STD.DIO connector provided on the controller will be disabled except for an interlock signal (DI 11). When the external 24V monitor control of system parameters is disabled, the interlock signal (DI 11) will also be disabled.
The I/O expressions used in the robot controller’s program language and the I/O expres- sions for the remote device stations differ. The correspondence is shown below.
Output from robot controller |
|
| Input to robot controller | |||
Program language | Remote device station | Program language | Remote device station | |||
| SOW(0)*3 | RWr0 |
|
| SIW(0)*3 | RWw0 |
| SOW(1)*3 | RWr1 |
|
| SIW(1)*3 | RWw1 |
SOD(2) | SOW(2) | RWr2 | SID(2) |
| SIW(2) | RWw2 |
| SOW(3) | RWr3 |
|
| SIW(3) | RWw3 |
SOD(4) | SOW(4) | RWr4 | SID(4) |
| SIW(4) | RWw4 |
| SOW(5) | RWr5 |
|
| SIW(5) | RWw5 |
SOD(6) | SOW(6) | RWr6 | SID(6) |
| SIW(6) | RWw6 |
| SOW(7) | RWr7 |
|
| SIW(7) | RWw7 |
SOD(8) | SOW(8) | RWr8 | SID(8) |
| SIW(8) | RWw8 |
| SOW(9) | RWr9 |
|
| SIW(9) | RWw9 |
SOD(10) | SOW(10) | RWrA | SID(10) |
| SIW(10) | RWwA |
| SOW(11) | RWrB |
|
| SIW(11) | RWwB |
SOD(12) | SOW(12) | RWrC | SID(12) |
| SIW(12) | RWwC |
| SOW(13) | RWrD |
|
| SIW(13) | RWwD |
SOD(14) | SOW(14) | RWrE | SID(14) |
| SIW(14) | RWwE |
| SOW(15) | RWrF |
|
| SIW(15) | RWwF |
SO0(7~0)*1 | RXn7~RXn0 | SI0(7~0)*1 |
| RYn7~RYn0 | ||
SO1(7~0)*1 | RXnF~RXn8 | SI1(7~0)*1 |
| RYnF~RYn8 | ||
SO2(7~0) |
| RX(n+1)7~RX(n+1)0 | SI2(7~0) |
| RY(n+1)7~RY(n+1)0 | |
SO3(7~0) |
| RX(n+1)F~RX(n+1)8 | SI3(7~0) |
| RY(n+1)F~RY(n+1)8 | |
SO4(7~0) |
| RX(n+2)7~RX(n+2)0 | SI4(7~0) |
| RY(n+2)7~RY(n+2)0 | |
SO5(7~0) |
| RX(n+2)F~RX(n+2)8 | SI5(7~0) |
| RY(n+2)F~RY(n+2)8 | |
SO6(7~0) |
| RX(n+3)7~RX(n+3)0 | SI6(7~0) |
| RY(n+3)7~RY(n+3)0 | |
SO7(7~0) |
| RX(n+3)F~RX(n+3)8 | SI7(7~0) |
| RY(n+3)F~RY(n+3)8 | |
SO10(7~0) | RX(n+4)7~RX(n+4)0 | SI10(7~0) |
| RY(n+4)7~RY(n+4)0 | ||
SO11(7~0) | RX(n+4)F~RX(n+4)8 | SI11(7~0) |
| RY(n+4)F~RY(n+4)8 | ||
SO12(7~0) | RX(n+5)7~RX(n+5)0 | SI12(7~0) |
| RY(n+5)7~RY(n+5)0 | ||
SO13(7~0) | RX(n+5)F~RX(n+5)8 | SI13(7~0) |
| RY(n+5)F~RY(n+5)8 | ||
SO14(7~0) | RX(n+6)7~RX(n+6)0 | SI14(7~0) |
| RY(n+6)7~RY(n+6)0 | ||
SO15(7~0) | RX(n+6)F~RX(n+6)8 | SI15(7~0) |
| RY(n+6)F~RY(n+6)8 | ||
| RX(n+7)F~RX(n+7)0*2 |
|
| RY(n+7)F~RY(n+7)0*2 | ||
n:Address assigned to master module with station No. setting n= (station No. - 1) ✕ 2
Caution)
*1: Has a meaning in the robot controller’s internal process as a dedicated input/output. This cannot be used as a
*2: This area is reserved for the
*3: Has a meaning in the robot controller’s internal process as a dedicated command region. This cannot be used as a
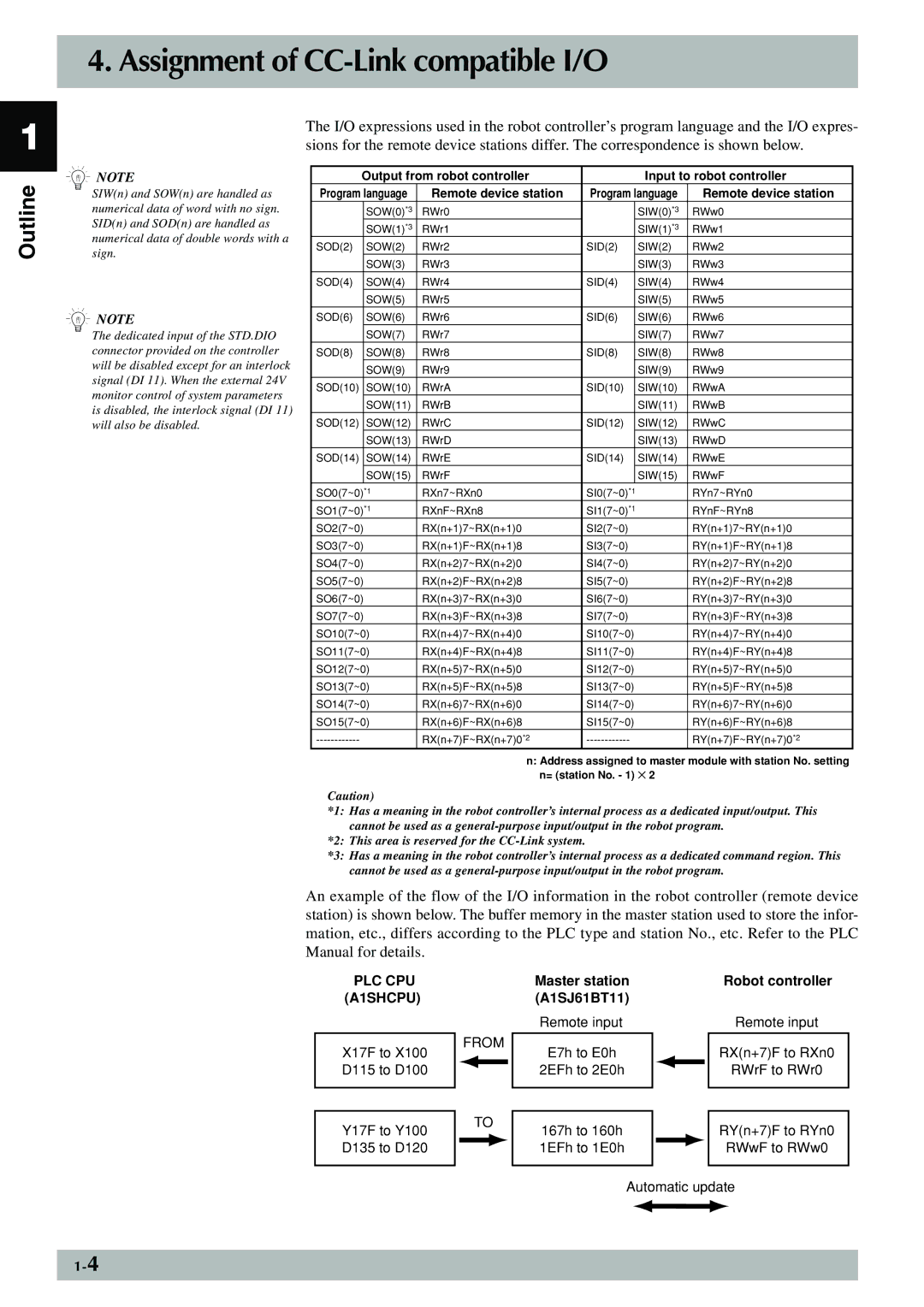
An example of the flow of the I/O information in the robot controller (remote device station) is shown below. The buffer memory in the master station used to store the infor- mation, etc., differs according to the PLC type and station No., etc. Refer to the PLC Manual for details.
PLC CPU |
|
|
| Master station | Robot controller | |||
(A1SHCPU) |
|
|
| (A1SJ61BT11) |
| |||
|
|
|
| Remote input | Remote input | |||
| FROM |
|
|
|
|
| ||
X17F to X100 | E7h to E0h |
|
|
| RX(n+7)F to RXn0 | |||
|
|
|
|
|
| |||
D115 to D100 |
|
|
| 2EFh to 2E0h |
|
|
| RWrF to RWr0 |
|
|
|
|
|
|
|
|
|
Y17F to Y100 |
| TO | 167h to 160h |
|
|
| RY(n+7)F to RYn0 | |
|
|
|
|
|
| |||
D135 to D120 |
|
|
| 1EFh to 1E0h |
|
|
| RWwF to RWw0 |
|
|
|
|
|
|
|
|
|
Automatic update