5. Shift of
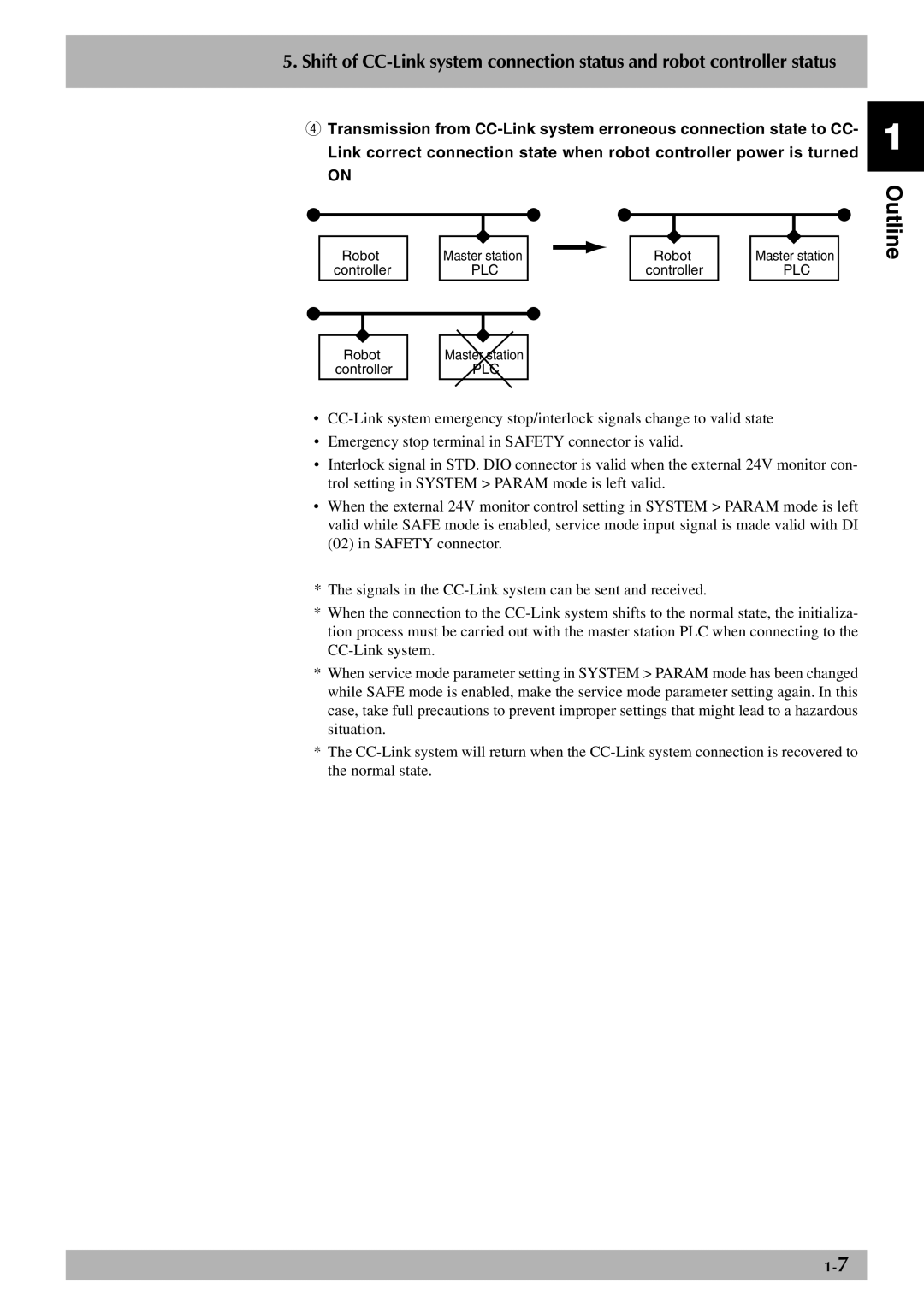
rTransmission from
ON
1
|
|
|
|
|
|
| Robot |
| Master station |
| |
| controller |
| PLC |
| |
|
|
|
|
|
|
|
| Robot |
| Master station |
| ||
| controller |
| PLC |
| ||
Robot controller
Master station
PLC
Outline
•
•Emergency stop terminal in SAFETY connector is valid.
•Interlock signal in STD. DIO connector is valid when the external 24V monitor con- trol setting in SYSTEM > PARAM mode is left valid.
•When the external 24V monitor control setting in SYSTEM > PARAM mode is left valid while SAFE mode is enabled, service mode input signal is made valid with DI (02) in SAFETY connector.
*The signals in the
*When the connection to the
*When service mode parameter setting in SYSTEM > PARAM mode has been changed while SAFE mode is enabled, make the service mode parameter setting again. In this case, take full precautions to prevent improper settings that might lead to a hazardous situation.
*The