STE 58760
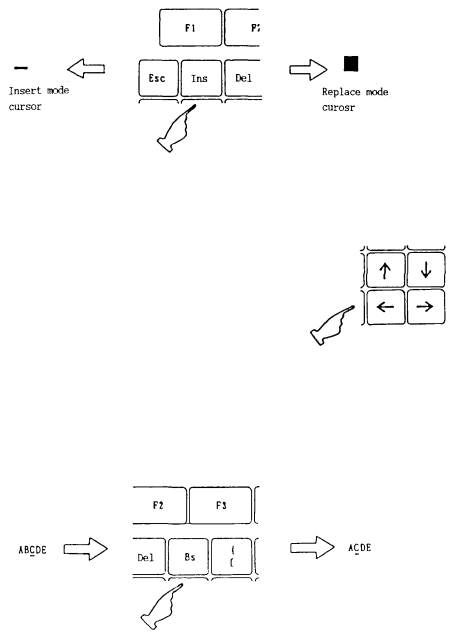
The "Ins" key changes between the insert mode and replace mode.
(b) Moving the cursor position:
Press the "←","→","↑", and "↓" keys to move the cursor where you want.
(c)Deleting a character using the "BS" key:
When you press the "Bs" key, the character just preceding the cursor is deleted. After the character is deleted, the cursor moves left one position. Each character following the cursor also moves left by one position.