MONITORING INPUT/OUTPUT
You can monitor the status of all input and output signals between the robot and the injection molding machine. The input/output display can be viewed when the robot is in Automatic mode or Manual mode.
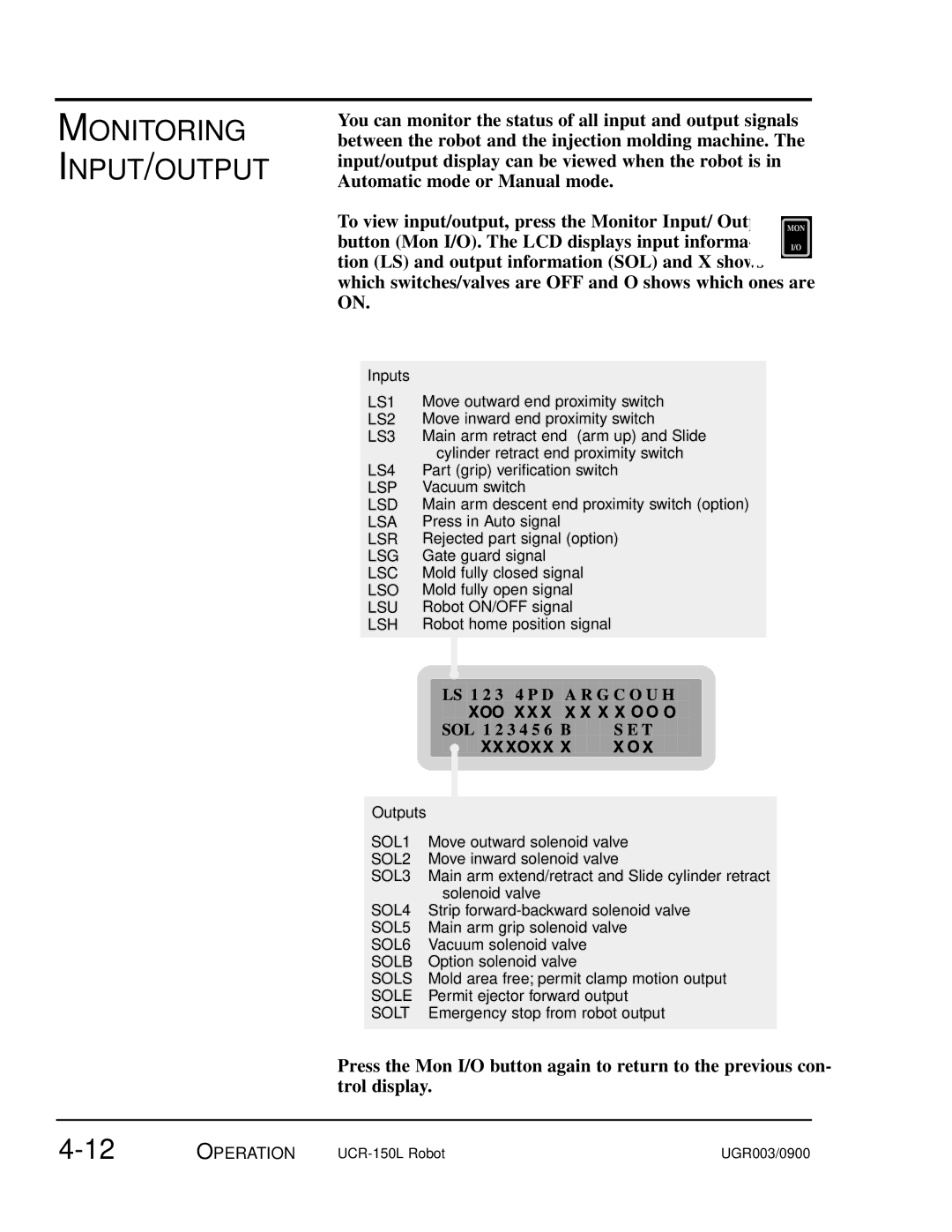
To view input/output, press the Monitor Input/ Output button (Mon I/O). The LCD displays input informa- ![]() tion (LS) and output information (SOL) and X shows which switches/valves are OFF and O shows which ones are ON.
tion (LS) and output information (SOL) and X shows which switches/valves are OFF and O shows which ones are ON.
Inputs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LS1 | Move outward end proximity switch | |||||||||||||||||||||
LS2 | Move inward end proximity switch | |||||||||||||||||||||
LS3 | Main arm retract end (arm up) and Slide | |||||||||||||||||||||
| cylinder retract end proximity switch | |||||||||||||||||||||
LS4 | Part (grip) verification switch | |||||||||||||||||||||
LSP | Vacuum switch | |||||||||||||||||||||
LSD | Main arm descent end proximity switch (option) | |||||||||||||||||||||
LSA | Press in Auto signal | |||||||||||||||||||||
LSR | Rejected part signal (option) | |||||||||||||||||||||
LSG | Gate guard signal | |||||||||||||||||||||
LSC | Mold fully closed signal | |||||||||||||||||||||
LSO | Mold fully open signal | |||||||||||||||||||||
LSU | Robot ON/OFF signal | |||||||||||||||||||||
LSH | Robot home position signal | |||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Outputs
SOL1 | Move outward solenoid valve |
SOL2 | Move inward solenoid valve |
SOL3 | Main arm extend/retract and Slide cylinder retract |
| solenoid valve |
SOL4 | Strip |
SOL5 | Main arm grip solenoid valve |
SOL6 | Vacuum solenoid valve |
SOLB | Option solenoid valve |
SOLS | Mold area free; permit clamp motion output |
SOLE | Permit ejector forward output |
SOLT | Emergency stop from robot output |
Press the Mon I/O button again to return to the previous con- trol display.
OPERATION | UGR003/0900 |