Manuals
/
Conair
/
Power Tools
/
Welding System
Conair
UGR003/0800
manual
Gripper Assembly
Models:
UGR003/0800
1
94
100
100
Download
100 pages
47.05 Kb
91
92
93
94
95
96
97
98
Troubleshooting
Specs
Install
Diagrams
Answering AN Alarm
Setting Timer Values
Connecting the Robot
Warranty
Maintenance
Identifying Cause of a Problem
Page 94
Image 94
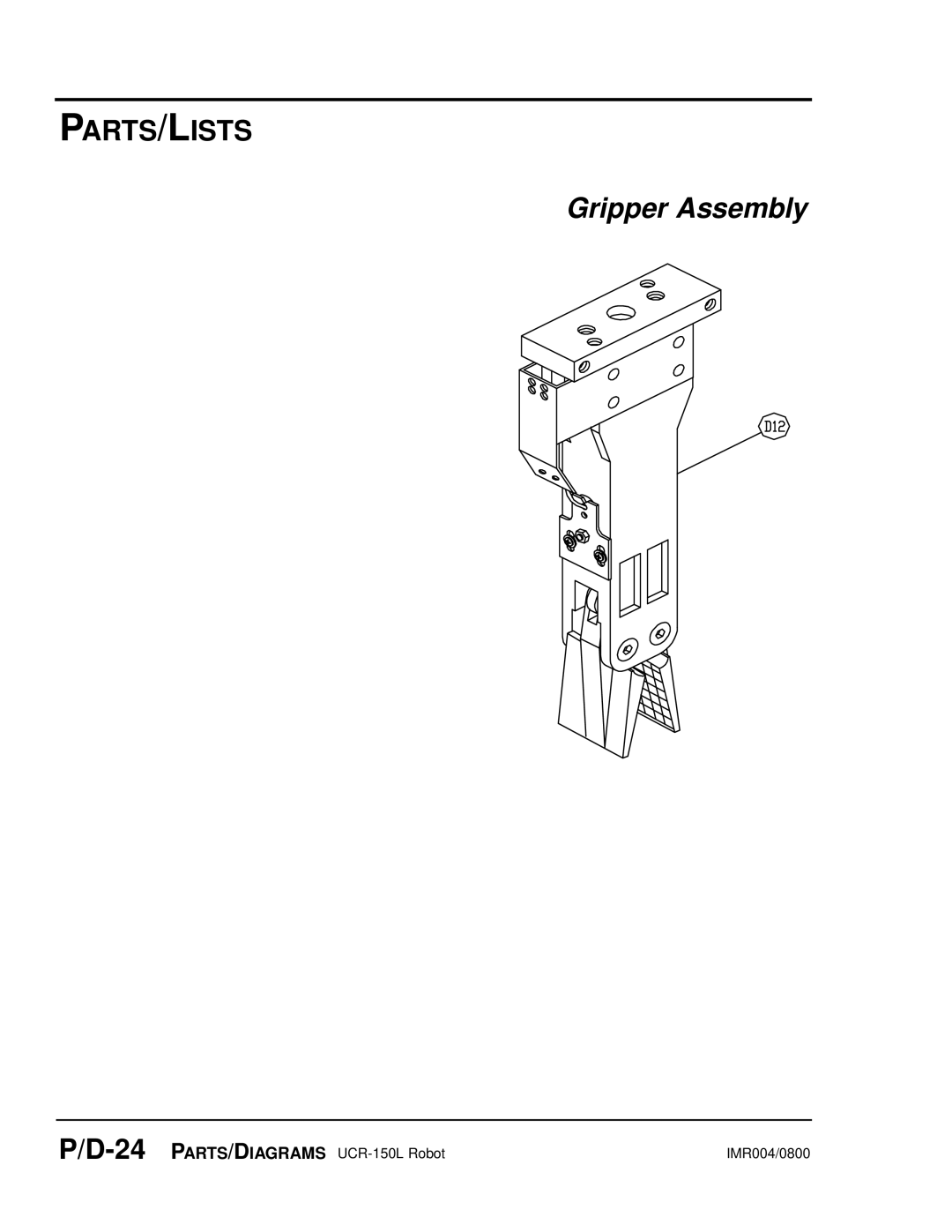
P
ARTS
/L
ISTS
Gripper Assembly
P/D-24
P
ARTS
/D
IAGRAMS
UCR-150L
Robot
IMR004/0800
Page 93
Page 95
Page 94
Image 94
Page 93
Page 95
Contents
UCR-150L Robot
Date Document Number
Table of Contents
Introduction
Maintenance
Introduction
HOW the User Guide is Organized
Purpose User Guide
Your Responsibility AS a User
Read this SO no ONE Gets Hurt
Page
Description
ROBOT?
What is
Typical Applications
HOW
Robot Works
Robot Features
Wrist flip cylinder
Specifications
Front view Side view
Extended strip stroke
Optional Equipment
End-of-arm tooling
Installation
Unpacking the Boxes
Remove all packing material
Installation
Preparing for Installation
Preparing the Platen
Mounting pattern for the UCR-150L Robot
Connecting the Robot
Positioning the Robot
Connect the SPI connector cable into
Check to see what the power output is from
Plug the hand-held control into the control
Open the mold Hold the main arm and loosen the arm height
Setting Gripper Position
Tighten the adjustment screws on the block
Set the gripper height to the sprue
Setting Strip Positions
Connecting AIR Pressure
Adjusting Sprue Verification Switch
Adjusting the Speed
Verifying Electrical Interface
Verifying motion controls permissives
Verifying the Inputs
Mold Full Open
Manual Testing
Press the Stop button
Automatic Testing
Press the Auto/Recycle button
Page
Operation
Hand Control Features
Before Starting
Stopping the Robot
Starting the Robot
Emergency Stopping
Viewing Information
Grips
Operating Manually
Starting Automatic Operation
Use the Up and Down arrows
Choosing the Mold
Press the Program button
Press the Enter button
Press Stop button
Programming Motion Sequence
Press Program button
Use the Forward arrow
Continue to move through the motion
Programming HOME, Grip Vacuum Positions
Press the Function button
Use the right arrow to choose the setting
Choose the function and settings you want
Press the Stop button to continue
Monitoring INPUT/OUTPUT
Inputs
Press the Time button
Setting Timer Values
Enter the new timer value
Press the Forward button
Choosing Timer Settings
Timer Setting Description LCD Displays
Adjusting Traverse Movement
Restarting Automatic Operation
Answering AN Alarm
Open the safety door and verify that there is
Use the Motion Control buttons
Maintenance
Maintenance Features
Maintenance
Preventative Maintenance Schedule
Daily
Monthly
Be sure the main power is disconnected
Checking Electrical Connections
Troubleshooting
Before Beginning
Identifying Cause of a Problem
FEW Words of Caution
Error Display Area of problem
Symptom Possible cause Solution
Robot Does not Cycle
Safety interlock is on. Check the output and wiring
Mold is Not Working Properly
ARM is Not Working Properly
Strip Motion Is not Working
There is no
Horizontal Motion
Gripper Does not Work
Gripper does not work
There is no vac Air pressure is incor Uum Rect
Before YOU
WE’RE Here to Help HOW to Contact Customer Service
From outside the United States, call
Appendix GUARANTEE/WARRANTY
Electrical
Diagrams
Solenoid and Limit Switch Wiring
Relay and IMM Interface
Solenoid Valves
Page
PARTS/DIAGRAMS
PARTS/LISTS
Ref. Part No Description
Traverse Cylinder
IMR004/0800 UCR-150L Robot PARTS/DIAGRAMS P/D-5
Valve
IMR004/0800 UCR-150L Robot PARTS/DIAGRAMS P/D-7
Valve Parts
JSU6
Slide Base
YSA10DC-50B
Strip Cylinder
U3-MA0-LS
Main Arm
Description Quantity
Main Arm Slide Unit
LM20UU
Main Cylinder
IMR004/0800 UCR-150L Robot PARTS/DIAGRAMS P/D-19
Wrist Flip
TANSI6P
Wrist Flip Cylinder
IMR004/0800 UCR-150L Robot PARTS/DIAGRAMS P/D-23
Gripper Assembly
D12 D9191 Assembly, Gripper, with LS-4
Gripper
GXL-8F
Controller
HW-CB116B
Top
Page
Image
Contents