When changing to a new mold, the traverse (horizontal) move- ment of the arm may need adjusted. To adjust the traverse movement:
1 | Press the Manual button on the control to |
| place the robot in manual mode. |
|
|
2 | Move the main arm to the Home position |
| using the control buttons. |
|
|
3 | Lower the main arm into the open mold and |
| see if the grip is centered over the mold. If it is not, you |
| need to adjust the traverse movement. |
|
|
4 | Retract the main arm to the Home position. |
| This locks the main arm vertically. |
|
|
5 | Turn off the air pressure to the robot and |
| drain the air. |
|
|
| EQUIPMENT DAMAGE |
| Always turn off and drain air from the robot |
| before adjusting the traverse movement. |
| Damage can occur to equipment! |
|
|
|
|
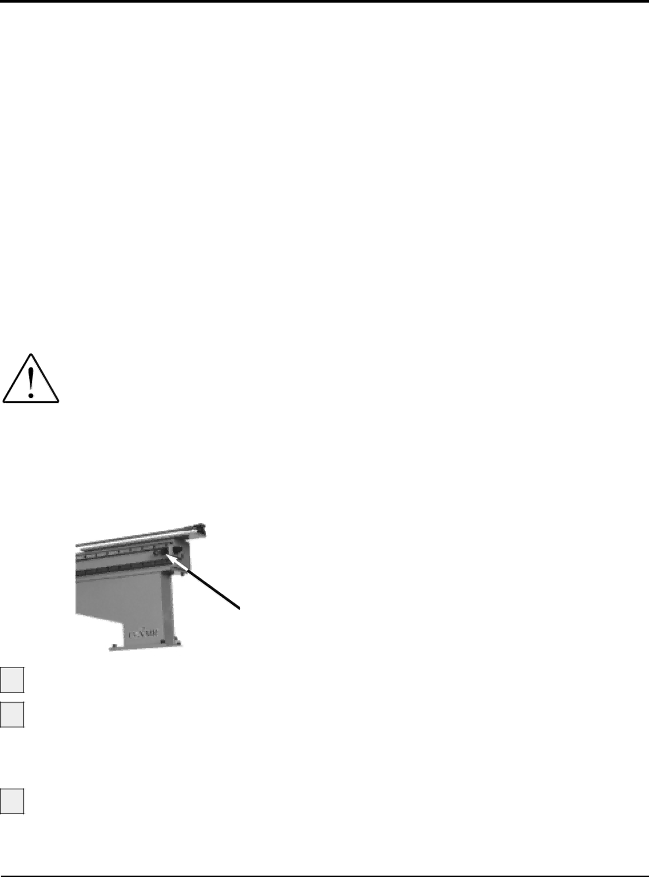
6 | Adjust the shock absorber until it is set |
| completely against the arm and the arm is centered verti- |
| cally over the sprue. Lock the shock absorber by tighten- |
| ing the locknut. |
ADJUSTING
TRAVERSE
MOVEMENT
Shock absorber
7
8
Connect the air line and turn air on.
Using the manual control buttons, extend the
main arm and grip. Check alignment with the mold and sprue. If alignment is incorrect, repeat steps 4 - 7 until alignment is correct.
9
Press the Mon I/O button on the control.
The Home input (LSH) should be ON (O). If it is OFF
(X)move the Home actuator on the back of the traverse beam until the Home input registers ON.
UGR003/0900 | OPERATION |