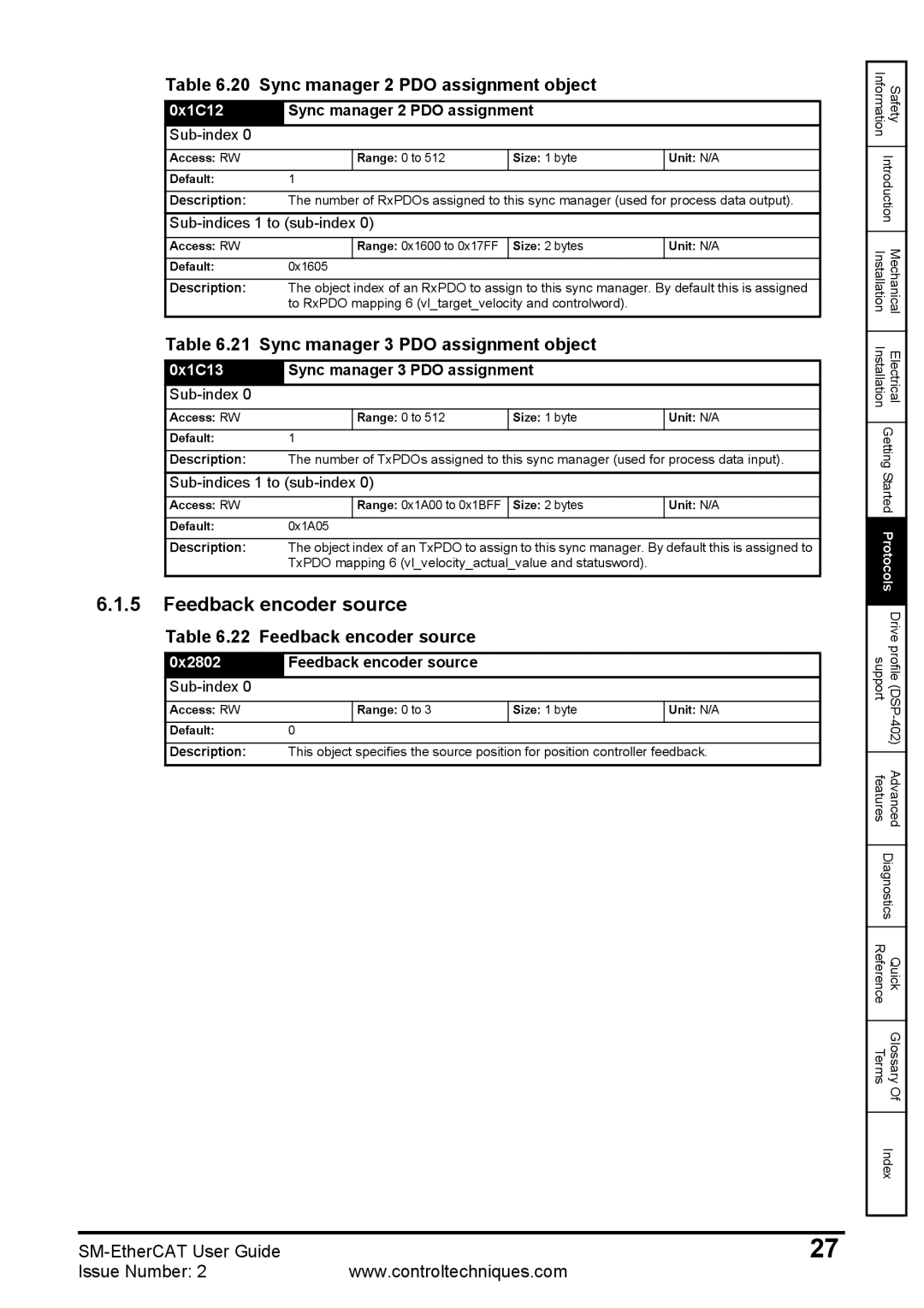
Table 6.20 Sync manager 2 PDO assignment object
0x1C12 | Sync manager 2 PDO assignment |
| ||
|
|
|
|
|
Access: RW |
| Range: 0 to 512 | Size: 1 byte | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
| |||
Description: | The number of RxPDOs assigned to this sync manager (used for process data output). | |||
|
|
| ||
Access: RW |
| Range: 0x1600 to 0x17FF | Size: 2 bytes | Unit: N/A |
|
|
|
|
|
Default: | 0x1605 |
|
|
|
Description: The object index of an RxPDO to assign to this sync manager. By default this is assigned to RxPDO mapping 6 (vl_target_velocity and controlword).
Table 6.21 Sync manager 3 PDO assignment object
0x1C13 | Sync manager 3 PDO assignment |
| ||
|
|
|
|
|
Access: RW |
| Range: 0 to 512 | Size: 1 byte | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
| |||
Description: | The number of TxPDOs assigned to this sync manager (used for process data input). | |||
|
|
| ||
|
| |||
|
|
|
|
|
Access: RW |
| Range: 0x1A00 to 0x1BFF | Size: 2 bytes | Unit: N/A |
|
|
|
|
|
Default: | 0x1A05 |
|
|
|
|
| |||
Description: | The object index of an TxPDO to assign to this sync manager. By default this is assigned to | |||
| TxPDO mapping 6 (vl_velocity_actual_value and statusword). |
| ||
6.1.5Feedback encoder source
Table 6.22 Feedback encoder source
0x2802 | Feedback encoder source |
|
| |
|
|
|
|
|
|
|
|
|
|
Access: RW |
| Range: 0 to 3 | Size: 1 byte | Unit: N/A |
|
|
|
|
|
Default: | 0 |
|
|
|
Description: This object specifies the source position for position controller feedback.
Information | Safety |
| |
Introduction | |
|
|
Installation | Mechanical |
|
|
Installation | Electrical |
| |
Getting Started | |
| |
Protocols | |
|
|
support | Drive profile |
|
|
features | Advanced |
| |
Diagnostics | |
|
|
Reference | Quick |
|
|
Terms | Glossary |
| Of |
| |
Index | |
|
|
27 | |
Issue Number: 2 | www.controltechniques.com |