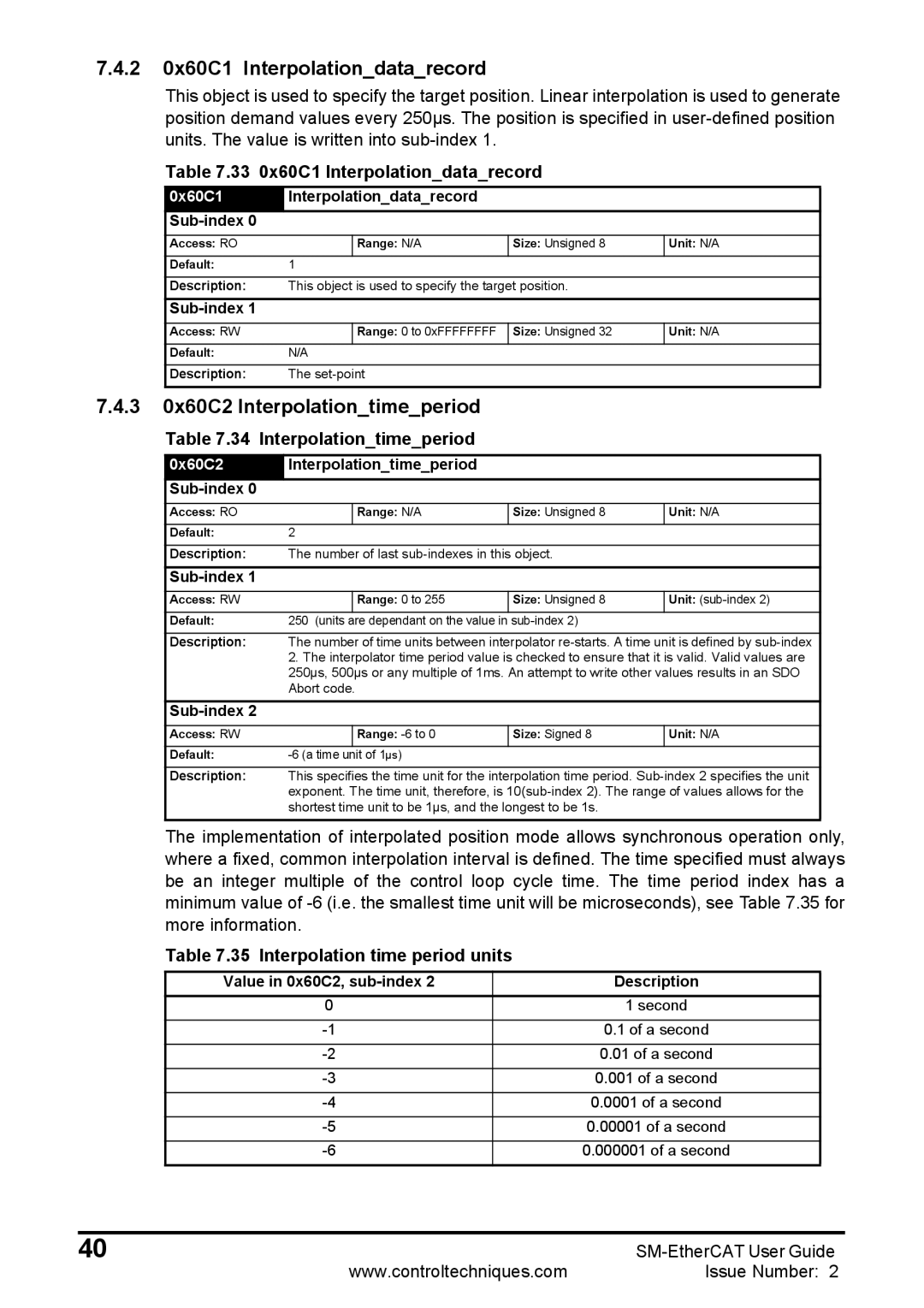
7.4.20x60C1 Interpolation_data_record
This object is used to specify the target position. Linear interpolation is used to generate position demand values every 250µs. The position is specified in
Table 7.33 0x60C1 Interpolation_data_record
0x60C1 | Interpolation_data_record |
|
| |
|
|
|
|
|
Access: RO |
| Range: N/A | Size: Unsigned 8 | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
|
| ||
Description: | This object is used to specify the target position. |
| ||
|
|
|
| |
Access: RW |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: N/A |
|
|
|
|
|
Default: | N/A |
|
|
|
|
|
|
| |
Description: | The |
|
| |
|
|
|
|
|
7.4.30x60C2 Interpolation_time_period
Table 7.34 Interpolation_time_period
0x60C2 | Interpolation_time_period |
|
| |
|
|
|
|
|
Access: RO |
| Range: N/A | Size: Unsigned 8 | Unit: N/A |
|
|
|
|
|
Default: | 2 |
|
|
|
|
|
| ||
Description: | The number of last |
| ||
|
|
|
| |
Access: RW |
| Range: 0 to 255 | Size: Unsigned 8 | Unit: |
|
|
|
|
|
Default: | 250 (units are dependant on the value in |
| ||
Description: The number of time units between interpolator
2.The interpolator time period value is checked to ensure that it is valid. Valid values are 250µs, 500µs or any multiple of 1ms. An attempt to write other values results in an SDO Abort code.
Access: RW |
| Range: | Size: Signed 8 | Unit: N/A |
Default: |
|
| ||
Description: This specifies the time unit for the interpolation time period.
The implementation of interpolated position mode allows synchronous operation only, where a fixed, common interpolation interval is defined. The time specified must always be an integer multiple of the control loop cycle time. The time period index has a minimum value of
Table 7.35 Interpolation time period units
Value in 0x60C2, | Description |
0 | 1 second |
0.1 of a second | |
|
|
0.01 of a second | |
0.001 of a second | |
|
|
0.0001 of a second | |
|
|
0.00001 of a second | |
0.000001 of a second | |
|
|
40 | |
www.controltechniques.com | Issue Number: 2 |