The object vl_velocity_min_max is handled every profile cycle. The vl_target_velocity is limited according to the values set in the object vl_velocity_min_max, which is read every profile cycle. The object vl_velocity_min_max_amount is mapped to vl_velocity_min_max.
The value of the vl_velocity_demand object is calculated in the background. The option reads the value of parameter Pr 2.01 (post ramp reference), scaled from RPM to user units using vl_dimension_factor and vl_setpoint_factor, and writes the value to the vl_velocity_demand object.
On a
The vl_velocity_acceleration and vl_velocity_deceleration objects are handled in the background. They are read, scaled to drive acceleration units (depending on the drive operating mode), and written to the drive acceleration rate and deceleration rate presets. In addition, if the drive acceleration rate preset is changed, the vl_velocity_acceleration object is updated, and if the drive deceleration rate preset is changed (Pr 2.21), the vl_velocity_deceleration object is updated.
7.6Profile Torque mode
The profile torque mode is supported on Unidrive SP, Digitax ST, Affinity, Mentor MP and Commander SK. It is possible to use this profile in regen mode on the Unidrive SP. On the Unidrive SP and Digitax ST in
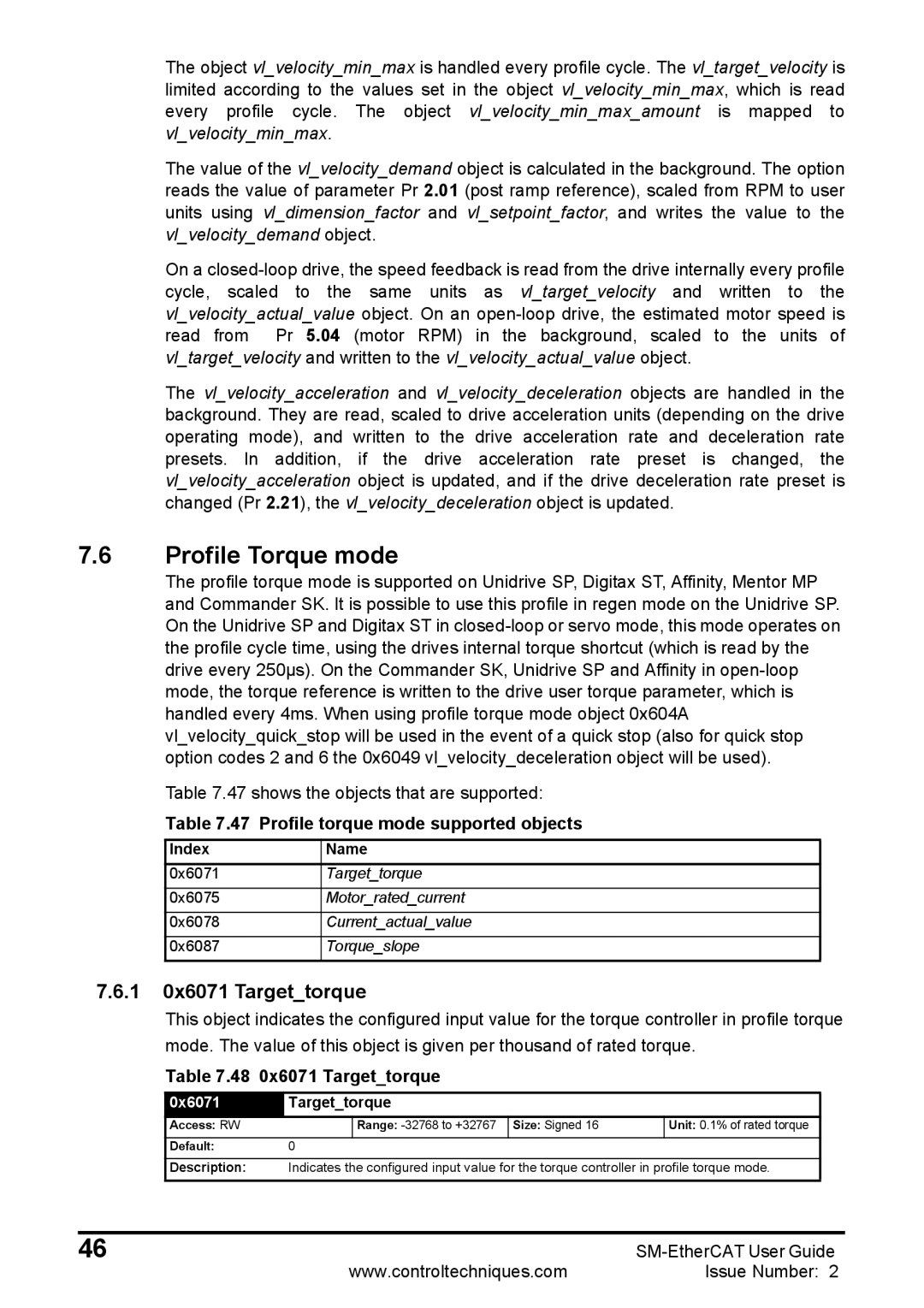
Table 7.47 shows the objects that are supported:
Table 7.47 Profile torque mode supported objects
Index | Name |
0x6071 | Target_torque |
0x6075 | Motor_rated_current |
|
|
0x6078 | Current_actual_value |
0x6087 | Torque_slope |
|
|
7.6.10x6071 Target_torque
This object indicates the configured input value for the torque controller in profile torque mode. The value of this object is given per thousand of rated torque.
Table 7.48 0x6071 Target_torque
0x6071 | Target_torque |
| ||
Access: RW |
| Range: | Size: Signed 16 | Unit: 0.1% of rated torque |
Default: | 0 |
|
|
|
|
| |||
Description: | Indicates the configured input value for the torque controller in profile torque mode. | |||
46 | |
www.controltechniques.com | Issue Number: 2 |