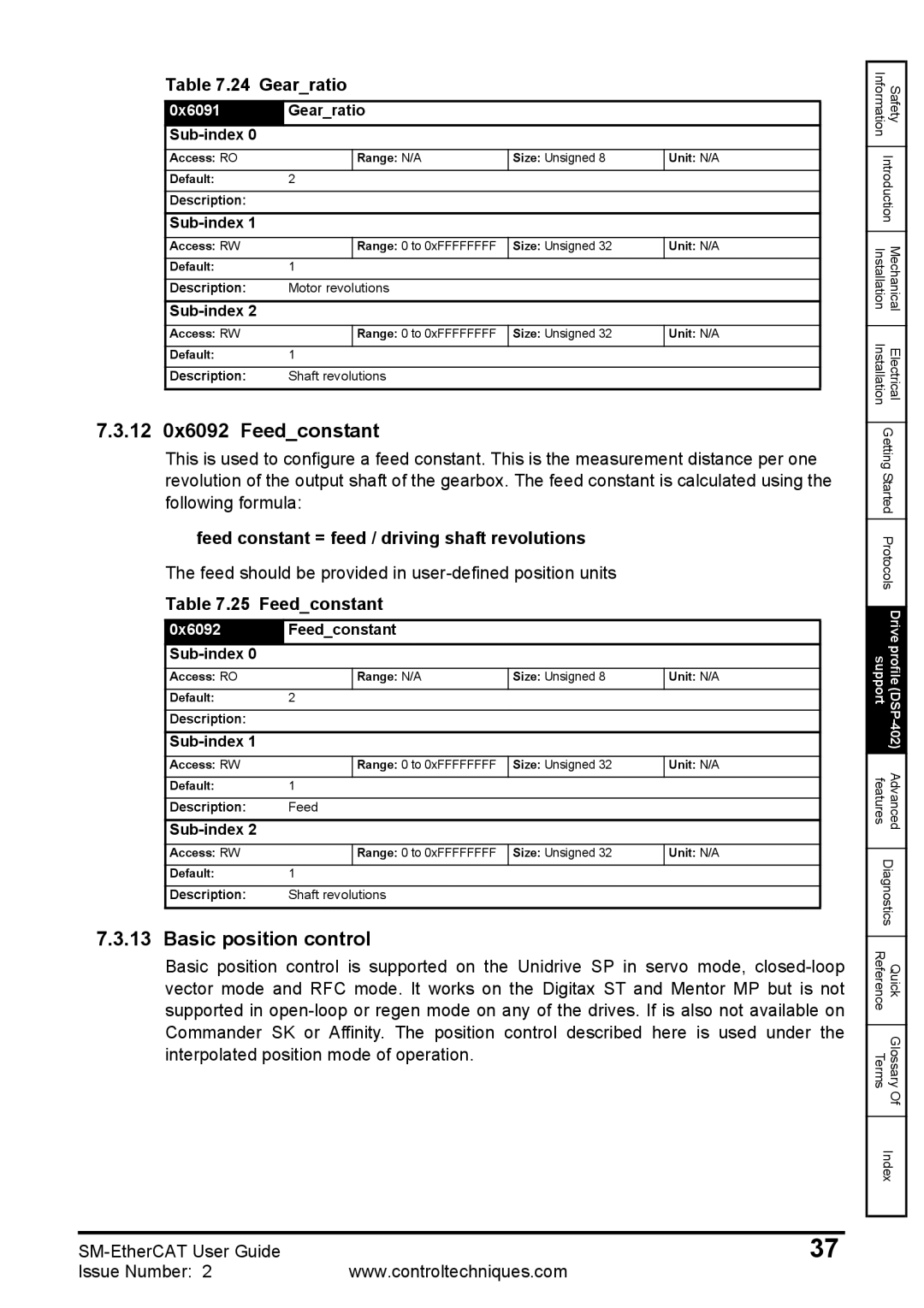
Table 7.24 Gear_ratio
0x6091 | Gear_ratio |
|
| |
|
|
|
| |
Access: RO |
| Range: N/A | Size: Unsigned 8 | Unit: N/A |
|
|
|
|
|
Default: | 2 |
|
|
|
|
|
|
|
|
Description: |
|
|
|
|
|
|
|
| |
Access: RW |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
|
|
| |
Description: | Motor revolutions |
|
| |
|
|
|
|
|
|
|
|
| |
Access: RW |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
|
|
| |
Description: | Shaft revolutions |
|
| |
7.3.120x6092 Feed_constant
This is used to configure a feed constant. This is the measurement distance per one revolution of the output shaft of the gearbox. The feed constant is calculated using the following formula:
feed constant = feed / driving shaft revolutions
The feed should be provided in
Table 7.25 Feed_constant
0x6092 | Feed_constant |
|
| |
|
|
|
| |
Access: RO |
| Range: N/A | Size: Unsigned 8 | Unit: N/A |
|
|
|
|
|
Default: | 2 |
|
|
|
|
|
|
|
|
Description: |
|
|
|
|
|
|
|
| |
Access: RW |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
|
|
| |
Description: | Feed |
|
| |
|
|
|
| |
Access: RW |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
|
|
| |
Description: | Shaft revolutions |
|
| |
|
|
|
|
|
7.3.13Basic position control
Basic position control is supported on the Unidrive SP in servo mode,
Information | Safety |
| |
Introduction | |
|
|
Installation | Mechanical |
|
|
Installation | Electrical |
| |
Getting Started | |
| |
Protocols | |
|
|
support | Drive profile |
features | Advanced |
| |
Diagnostics | |
|
|
Reference | Quick |
|
|
Terms | Glossary |
| Of |
| |
Index | |
|
|
37 | |
Issue Number: 2 | www.controltechniques.com |