Commander SK / Commander SL
The software version of the Solutions Module can be identified by looking at Pr 15.02 and Pr 15.51.
The software version takes the form of xx.yy.zz, where Pr 15.02 displays xx.yy and Pr 15.51 displays zz (e.g. for software version 01.01.00 Pr 15.02 will display 1.01 and Pr 15.51 will display 0).
9.2Network configuration objects
9.2.1SM-EtherCAT network loss trip
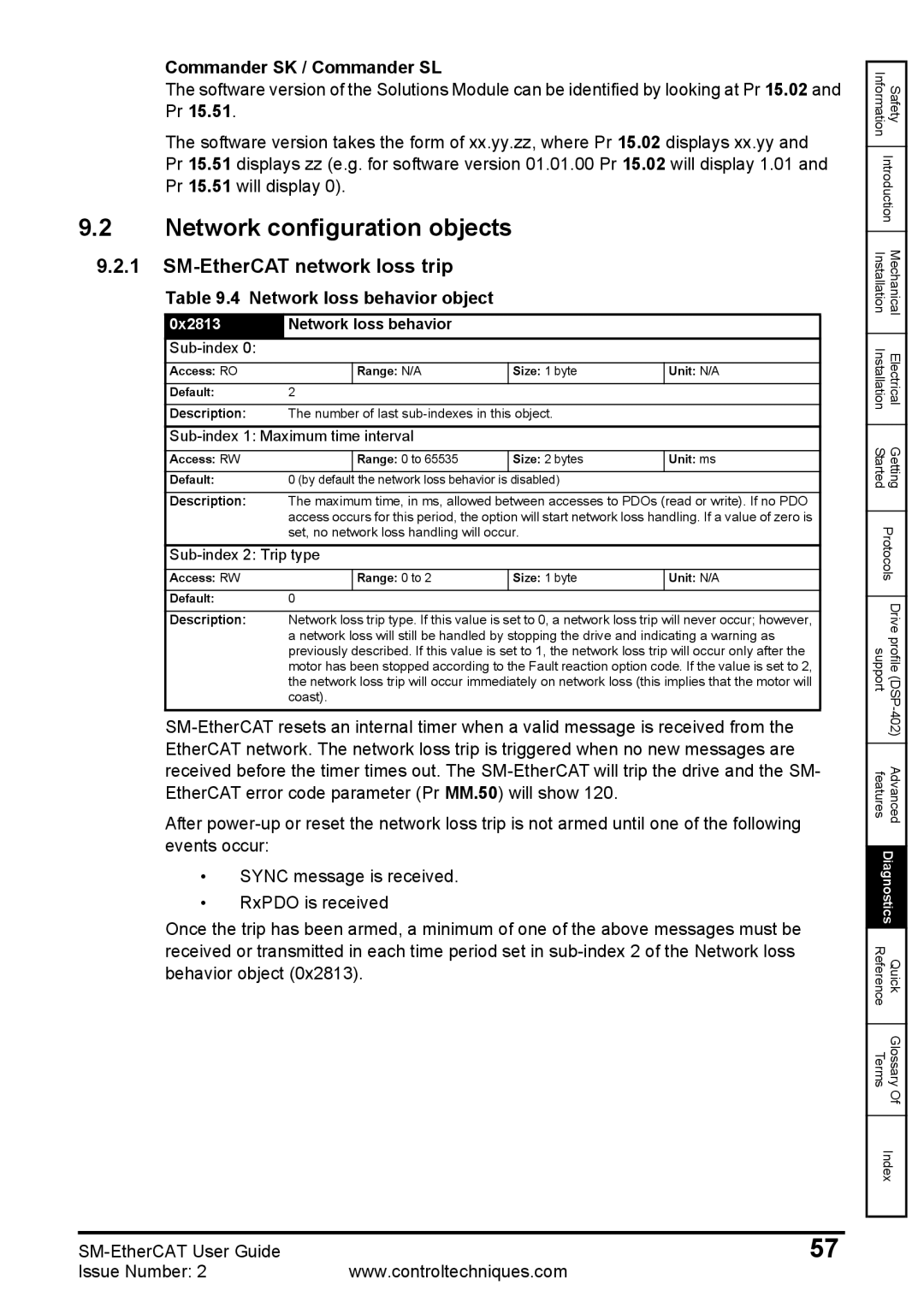
Table 9.4 Network loss behavior object
0x2813 | Network loss behavior |
|
| |
|
|
|
|
|
Access: RO |
| Range: N/A | Size: 1 byte | Unit: N/A |
|
|
|
|
|
Default: | 2 |
|
|
|
|
|
| ||
Description: | The number of last |
| ||
Sub-index 1: Maximum time interval
Access: RW | Range: 0 to 65535 | Size: 2 bytes | Unit: ms |
Default:0 (by default the network loss behavior is disabled)
Description: The maximum time, in ms, allowed between accesses to PDOs (read or write). If no PDO access occurs for this period, the option will start network loss handling. If a value of zero is set, no network loss handling will occur.
Sub-index 2: Trip type
Access: RW |
| Range: 0 to 2 | Size: 1 byte | Unit: N/A |
Default: | 0 |
|
|
|
Description: Network loss trip type. If this value is set to 0, a network loss trip will never occur; however, a network loss will still be handled by stopping the drive and indicating a warning as previously described. If this value is set to 1, the network loss trip will occur only after the motor has been stopped according to the Fault reaction option code. If the value is set to 2, the network loss trip will occur immediately on network loss (this implies that the motor will coast).
After
•SYNC message is received.
•RxPDO is received
Once the trip has been armed, a minimum of one of the above messages must be received or transmitted in each time period set in
Information | Safety |
| |
Introduction | |
|
|
Installation | Mechanical |
|
|
Installation | Electrical |
|
|
Started | Getting |
| |
Protocols | |
|
|
support | Drive profile |
|
|
features | Advanced |
| |
Diagnostics | |
Reference | Quick |
|
|
Terms | Glossary |
| Of |
| |
Index | |
|
|
57 | |
Issue Number: 2 | www.controltechniques.com |