5 Getting Started
5.1Quick start guide
This section is intended to provide a generic guide for setting up
5.1.1SM-EtherCAT version compatibility
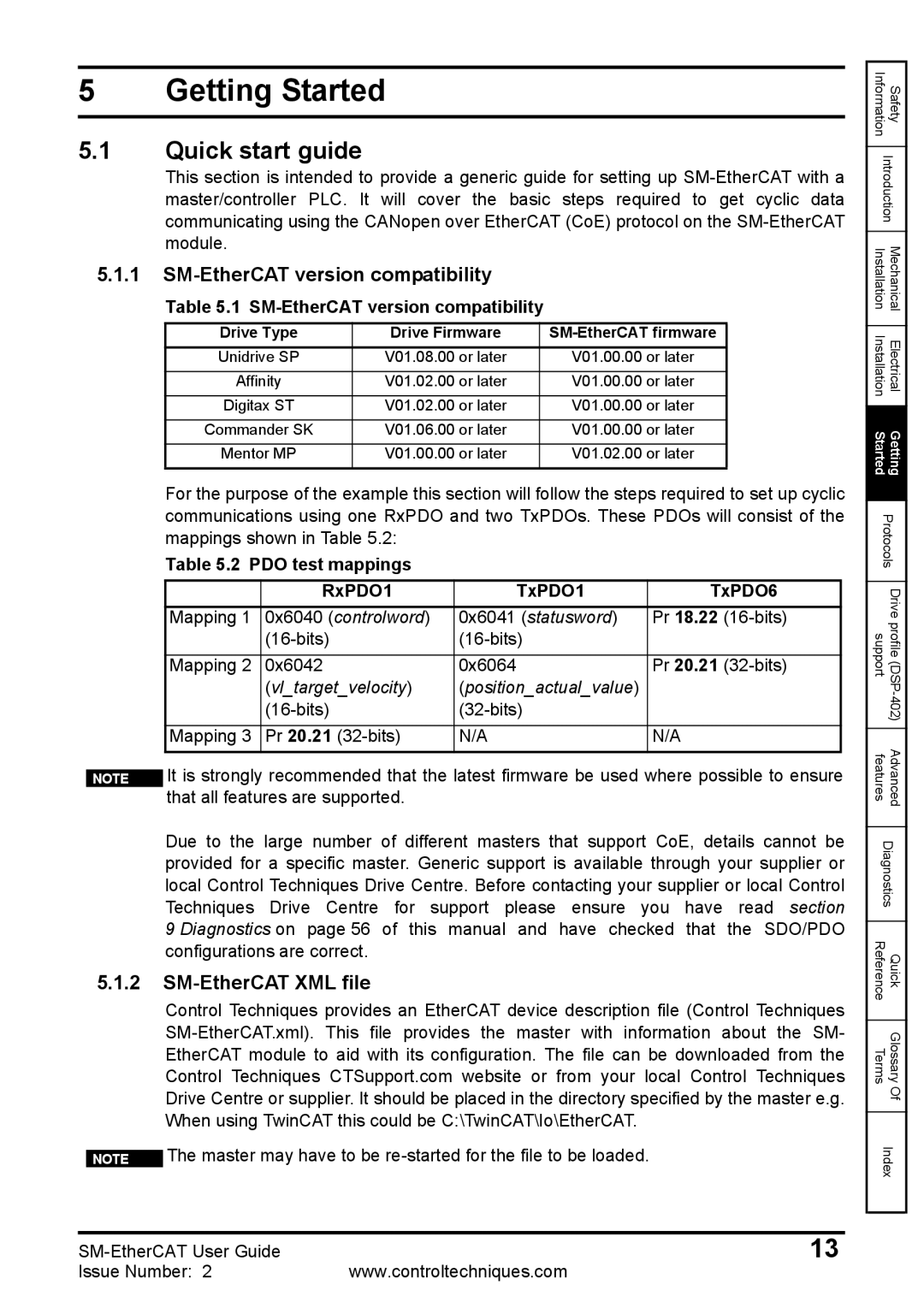
Table 5.1 SM-EtherCAT version compatibility
Drive Type | Drive Firmware |
|
Unidrive SP | V01.08.00 or later | V01.00.00 or later |
|
|
|
Affinity | V01.02.00 or later | V01.00.00 or later |
Digitax ST | V01.02.00 or later | V01.00.00 or later |
|
|
|
Commander SK | V01.06.00 or later | V01.00.00 or later |
|
|
|
Mentor MP | V01.00.00 or later | V01.02.00 or later |
For the purpose of the example this section will follow the steps required to set up cyclic communications using one RxPDO and two TxPDOs. These PDOs will consist of the mappings shown in Table 5.2:
Table 5.2 PDO test mappings
|
| RxPDO1 | TxPDO1 | TxPDO6 |
| Mapping 1 | 0x6040 (controlword) | 0x6041 (statusword) | Pr 18.22 |
|
|
| ||
|
|
|
|
|
| Mapping 2 | 0x6042 | 0x6064 | Pr 20.21 |
|
| (vl_target_velocity) | (position_actual_value) |
|
|
|
| ||
|
|
|
|
|
| Mapping 3 | Pr 20.21 | N/A | N/A |
| It is strongly recommended that the latest firmware be used where possible to ensure | |||
NOTE | ||||
| that all features are supported. |
|
| |
Due to the large number of different masters that support CoE, details cannot be provided for a specific master. Generic support is available through your supplier or local Control Techniques Drive Centre. Before contacting your supplier or local Control Techniques Drive Centre for support please ensure you have read section 9 Diagnostics on page 56 of this manual and have checked that the SDO/PDO configurations are correct.
5.1.2SM-EtherCAT XML file
Control Techniques provides an EtherCAT device description file (Control Techniques
| The master may have to be |
NOTE |
Information | Safety |
| |
Introduction | |
|
|
Installation | Mechanical |
|
|
Installation | Electrical |
|
|
Started | Getting |
| |
Protocols | |
|
|
support | Drive profile |
|
|
features | Advanced |
| |
Diagnostics | |
|
|
Reference | Quick |
|
|
Terms | Glossary |
| Of |
| |
Index | |
|
|
13 | |
Issue Number: 2 | www.controltechniques.com |