Use of controlword and statusword
The homing mode uses some bits of the controlword and the statusword for mode- specific purposes. Table 7.52 Definition of bits 4 and 8 of the controlword on page 52 defines the values for bits 4 and 8 of the controlword.
Table 7.52 Definition of bits 4 and 8 of the controlword
Bit | Value | Definition | |
4 | 0 | Do not start homing procedure. | |
1 | Start or continue homing procedure. | ||
| |||
|
|
| |
8 | 0 | Enable bit 4. | |
1 | Stop axis according to halt option code (0x605D). | ||
| |||
|
|
|
Table 7.53 Definition of bits 10 and 12 of the statusword on page 52 defines the values for bits 10 and 12 of the statusword.
Table 7.53 Definition of bits 10 and 12 of the statusword
Bit 12 | Bit 10 | Definition |
0 | 0 | Homing procedure is in progress. |
0 | 1 | Homing procedure is interrupted or not started. |
|
|
|
1 | 0 | Homing is attained, but target is not reached. |
1 | 1 | Homing procedure was completed successfully. |
|
|
|
0 | 0 | Homing error occurred, velocity is not 0. |
|
|
|
0 | 1 | Homing error occurred, velocity is 0. |
1 | X | Reserved. |
|
|
|
7.7.2Homing mode object definitions
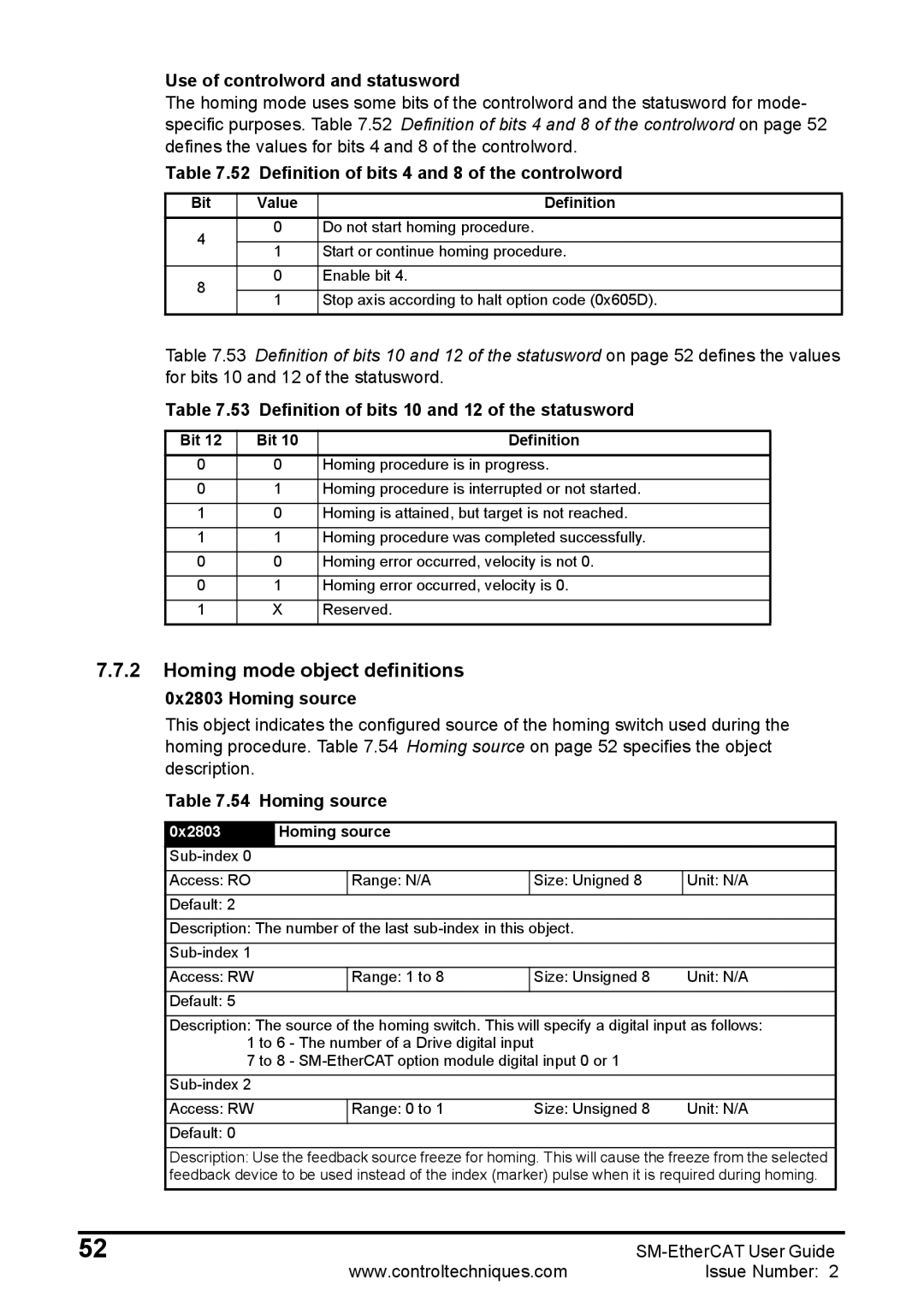
0x2803 Homing source
This object indicates the configured source of the homing switch used during the homing procedure. Table 7.54 Homing source on page 52 specifies the object description.
Table 7.54 Homing source
0x2803 | Homing source |
|
| |
|
|
|
| |
Access: RO |
| Range: N/A | Size: Unigned 8 | Unit: N/A |
|
|
|
|
|
Default: 2 |
|
|
|
|
|
| |||
Description: The number of the last |
| |||
|
|
|
| |
|
|
|
|
|
Access: RW |
| Range: 1 to 8 | Size: Unsigned 8 | Unit: N/A |
|
|
|
|
|
Default: 5
Description: The source of the homing switch. This will specify a digital input as follows: 1 to 6 - The number of a Drive digital input
7 to 8 -
Access: RW | Range: 0 to 1 | Size: Unsigned 8 | Unit: N/A |
Default: 0
Description: Use the feedback source freeze for homing. This will cause the freeze from the selected feedback device to be used instead of the index (marker) pulse when it is required during homing.
52 |
|
www.controltechniques.com | Issue Number: 2 |