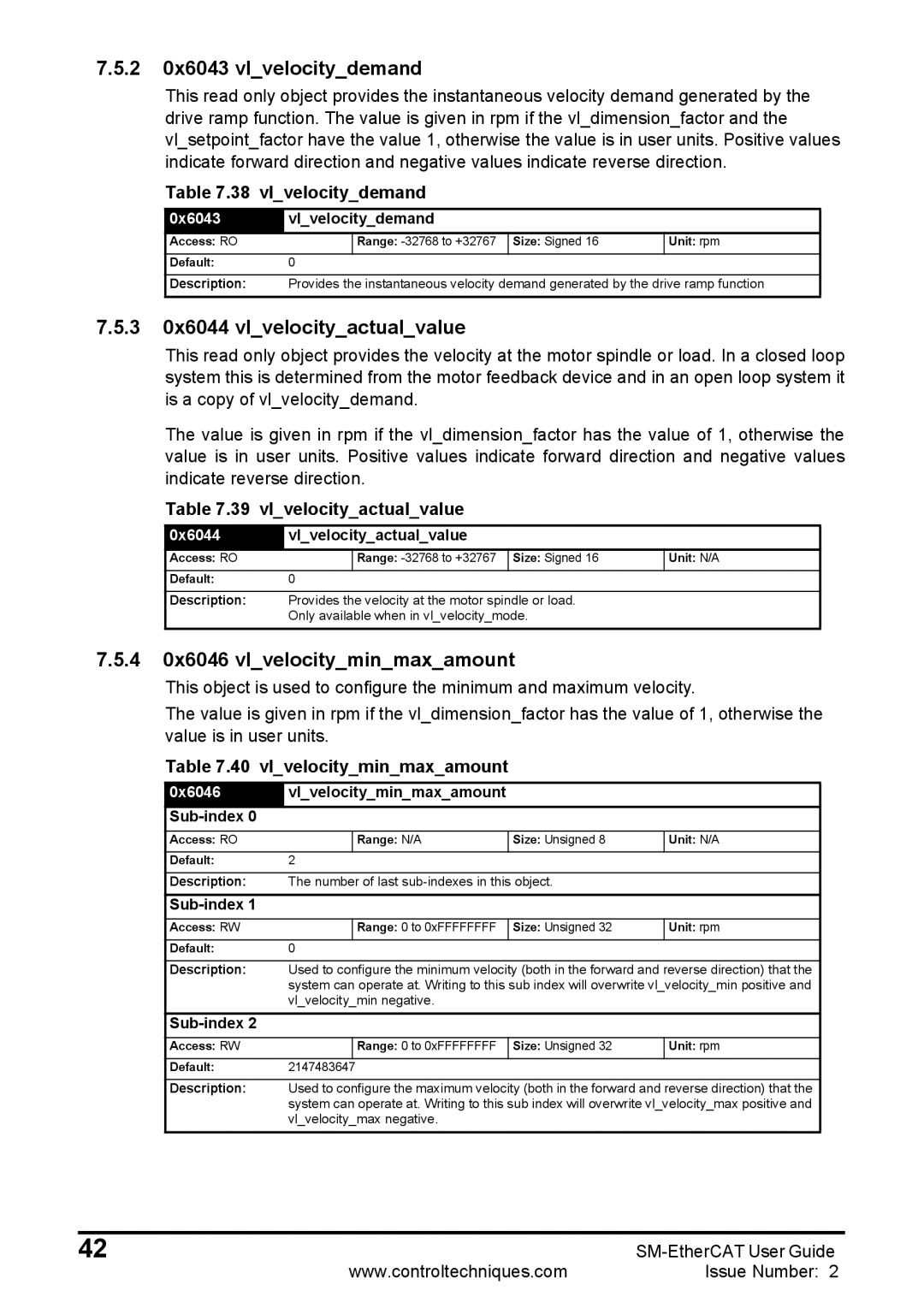
7.5.20x6043 vl_velocity_demand
This read only object provides the instantaneous velocity demand generated by the drive ramp function. The value is given in rpm if the vl_dimension_factor and the vl_setpoint_factor have the value 1, otherwise the value is in user units. Positive values indicate forward direction and negative values indicate reverse direction.
Table 7.38 vl_velocity_demand
0x6043 | vl_velocity_demand |
| ||
Access: RO |
| Range: | Size: Signed 16 | Unit: rpm |
Default: | 0 |
|
|
|
|
| |||
Description: | Provides the instantaneous velocity demand generated by the drive ramp function | |||
7.5.3 0x6044 vl_velocity_actual_value
This read only object provides the velocity at the motor spindle or load. In a closed loop system this is determined from the motor feedback device and in an open loop system it is a copy of vl_velocity_demand.
The value is given in rpm if the vl_dimension_factor has the value of 1, otherwise the value is in user units. Positive values indicate forward direction and negative values indicate reverse direction.
Table 7.39 vl_velocity_actual_value
0x6044 | vl_velocity_actual_value |
| ||
Access: RO |
| Range: | Size: Signed 16 | Unit: N/A |
Default: | 0 |
|
|
|
|
|
| ||
Description: | Provides the velocity at the motor spindle or load. |
| ||
| Only available when in vl_velocity_mode. |
| ||
7.5.4 0x6046 vl_velocity_min_max_amount
This object is used to configure the minimum and maximum velocity.
The value is given in rpm if the vl_dimension_factor has the value of 1, otherwise the value is in user units.
Table 7.40 vl_velocity_min_max_amount
0x6046 | vl_velocity_min_max_amount |
|
| |
|
|
|
|
|
Access: RO |
| Range: N/A | Size: Unsigned 8 | Unit: N/A |
|
|
|
|
|
Default: | 2 |
|
|
|
|
|
| ||
Description: | The number of last |
| ||
|
|
|
|
|
|
|
|
| |
Access: RW |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: rpm |
|
|
|
|
|
Default: | 0 |
|
|
|
|
| |||
Description: | Used to configure the minimum velocity (both in the forward and reverse direction) that the | |||
| system can operate at. Writing to this sub index will overwrite vl_velocity_min positive and | |||
| vl_velocity_min negative. |
|
| |
|
|
|
|
|
|
|
|
| |
Access: RW |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: rpm |
|
|
|
|
|
Default: | 2147483647 |
|
|
|
|
| |||
Description: | Used to configure the maximum velocity (both in the forward and reverse direction) that the | |||
| system can operate at. Writing to this sub index will overwrite vl_velocity_max positive and | |||
| vl_velocity_max negative. |
|
| |
|
|
|
|
|
42 | |
www.controltechniques.com | Issue Number: 2 |