7 Drive profile (DSP-402) support
•Interpolated position mode
•vl velocity mode
•Profile torque mode
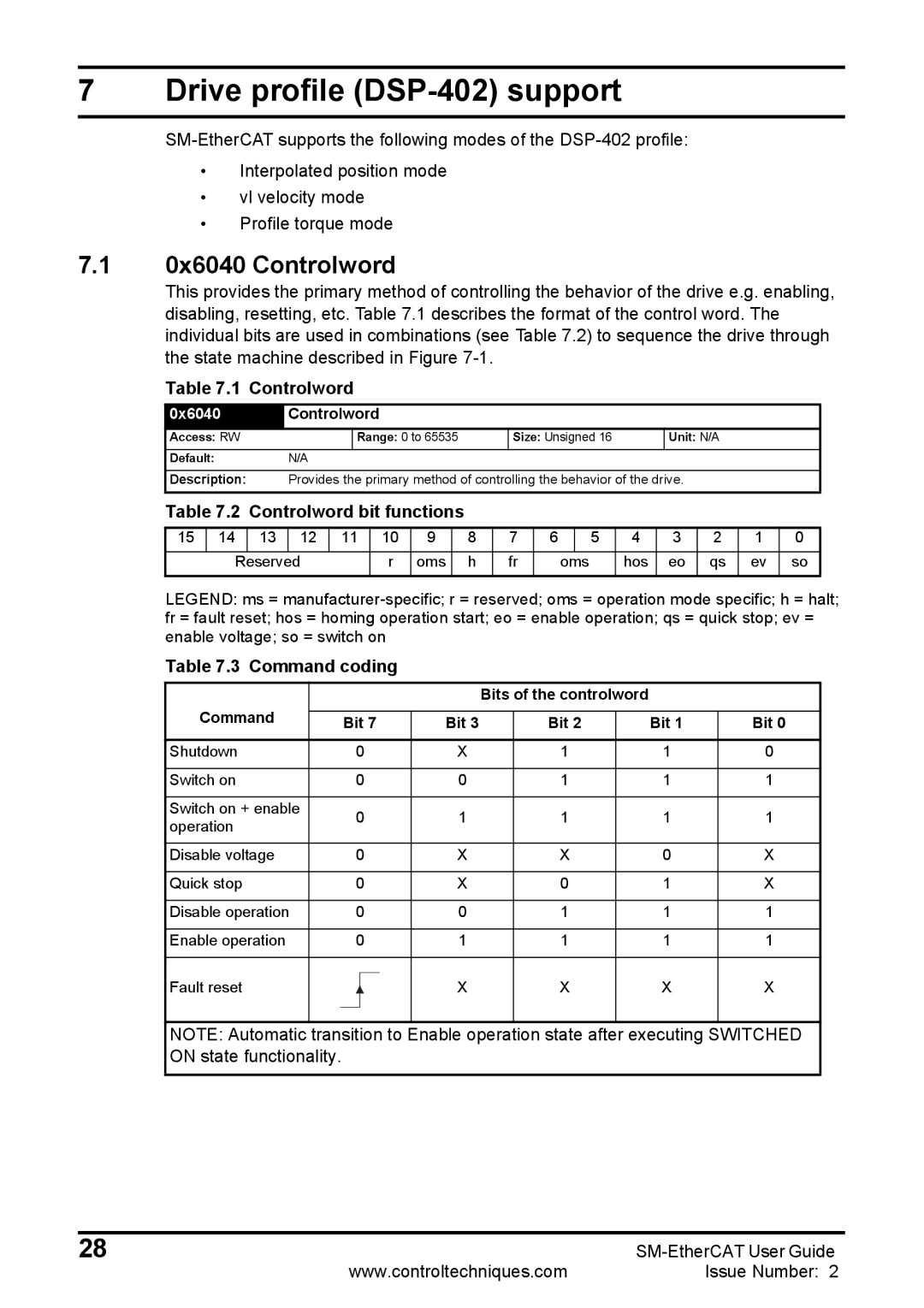
7.10x6040 Controlword
This provides the primary method of controlling the behavior of the drive e.g. enabling, disabling, resetting, etc. Table 7.1 describes the format of the control word. The individual bits are used in combinations (see Table 7.2) to sequence the drive through the state machine described in Figure
Table 7.1 Controlword
0x6040 | Controlword |
|
| |
Access: RW |
| Range: 0 to 65535 | Size: Unsigned 16 | Unit: N/A |
|
|
|
|
|
Default: | N/A |
|
|
|
|
| |||
Description: | Provides the primary method of controlling the behavior of the drive. | |||
|
|
|
|
|
Table 7.2 Controlword bit functions
15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 |
| 5 | 4 | 3 | 2 | 1 | 0 |
|
| Reserved |
|
| r | oms | h | fr |
| oms | hos | eo | qs | ev | so | |
LEGEND: ms =
Table 7.3 Command coding
Bits of the controlword
Command | Bit 7 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| ||||||
Shutdown | 0 | X | 1 | 1 | 0 | |
Switch on | 0 | 0 | 1 | 1 | 1 | |
Switch on + enable | 0 | 1 | 1 | 1 | 1 | |
operation | ||||||
|
|
|
|
| ||
Disable voltage | 0 | X | X | 0 | X | |
Quick stop | 0 | X | 0 | 1 | X | |
Disable operation | 0 | 0 | 1 | 1 | 1 | |
Enable operation | 0 | 1 | 1 | 1 | 1 | |
Fault reset |
| X | X | X | X |
NOTE: Automatic transition to Enable operation state after executing SWITCHED ON state functionality.
28 | |
www.controltechniques.com | Issue Number: 2 |