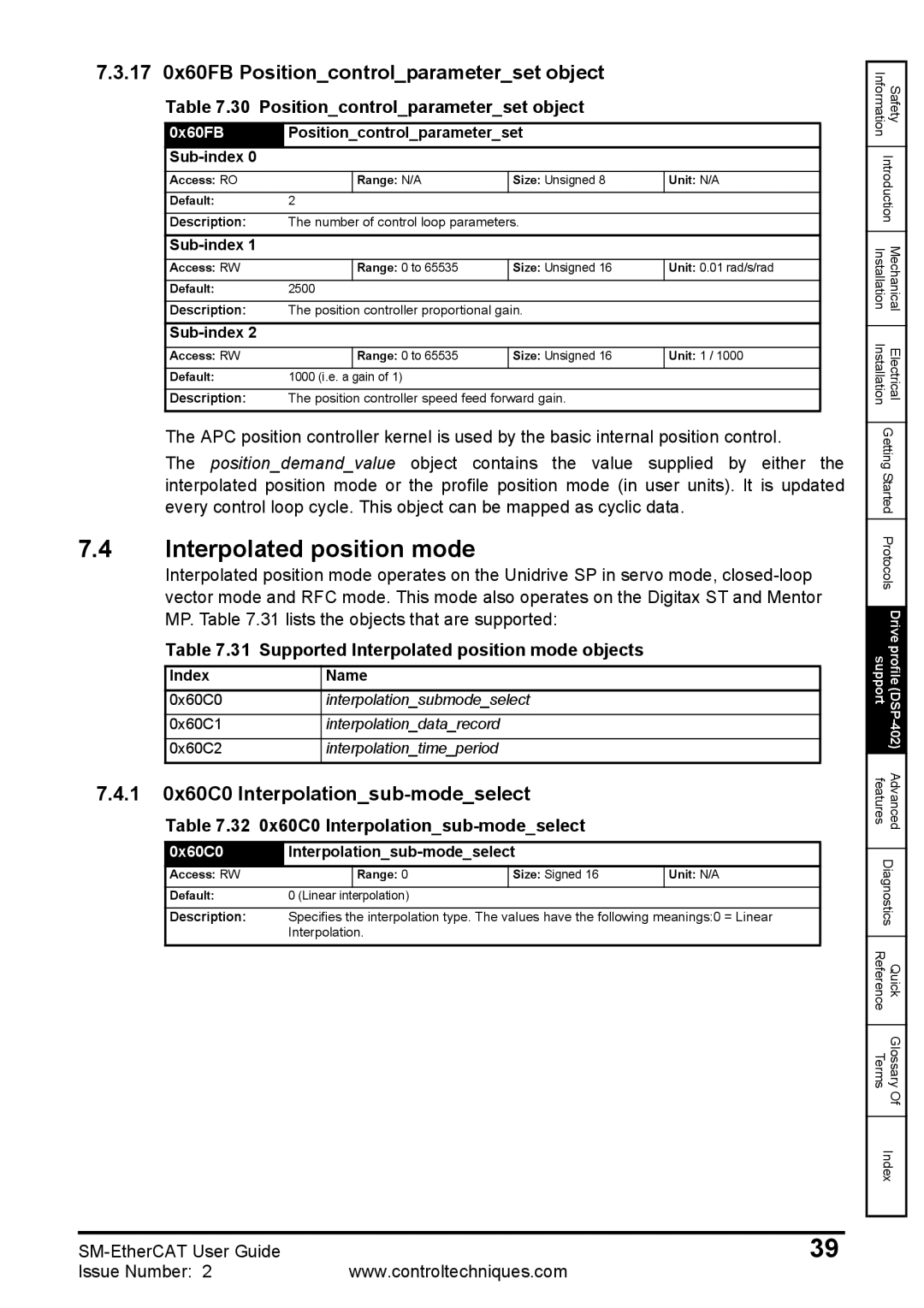
7.3.17 0x60FB Position_control_parameter_set object
Table 7.30 Position_control_parameter_set object
0x60FB Position_control_parameter_set
Sub-index 0
Access: RO |
| Range: N/A | Size: Unsigned 8 | Unit: N/A |
Default: | 2 |
|
|
|
|
|
| ||
Description: | The number of control loop parameters. |
| ||
|
|
|
|
|
|
|
|
| |
Access: RW |
| Range: 0 to 65535 | Size: Unsigned 16 | Unit: 0.01 rad/s/rad |
|
|
|
|
|
Default: | 2500 |
|
|
|
|
|
| ||
Description: | The position controller proportional gain. |
| ||
|
|
|
| |
Access: RW |
| Range: 0 to 65535 | Size: Unsigned 16 | Unit: 1 / 1000 |
|
|
|
|
|
Default: | 1000 (i.e. a gain of 1) |
|
| |
|
|
| ||
Description: | The position controller speed feed forward gain. |
| ||
The APC position controller kernel is used by the basic internal position control.
The position_demand_value object contains the value supplied by either the interpolated position mode or the profile position mode (in user units). It is updated every control loop cycle. This object can be mapped as cyclic data.
7.4Interpolated position mode
Interpolated position mode operates on the Unidrive SP in servo mode,
Table 7.31 Supported Interpolated position mode objects
Index | Name |
0x60C0 | interpolation_submode_select |
|
|
0x60C1 | interpolation_data_record |
0x60C2 | interpolation_time_period |
|
|
7.4.10x60C0 Interpolation_sub-mode_select
Table 7.32 0x60C0 Interpolation_sub-mode_select
0x60C0 |
|
| ||
Access: RW |
| Range: 0 | Size: Signed 16 | Unit: N/A |
Default: | 0 (Linear | interpolation) |
|
|
Description: Specifies the interpolation type. The values have the following meanings:0 = Linear Interpolation.
Information | Safety |
| |
Introduction | |
|
|
Installation | Mechanical |
|
|
Installation | Electrical |
| |
Getting Started | |
| |
Protocols | |
|
|
support | Drive profile |
features | Advanced |
| |
Diagnostics | |
|
|
Reference | Quick |
|
|
Terms | Glossary |
| Of |
| |
Index | |
|
|
39 | |
Issue Number: 2 | www.controltechniques.com |