7.3.9Profile units
The implementation provides a means to convert profile units into position controller and drive units. All scaling values are standard profile objects. The following objects are supported:
Table 7.22 Supported profile units
Index | Name |
0x608F | position_encoder_resolution |
0x6091 | gear_ratio |
|
|
0x6092 | feed_constant |
For positions, the scaling control includes a feed constant, a gear ratio and an encoder revolution. These values are combined by the implementation into a simple scaling numerator and denominator. It is possible to change these values
For velocities, in addition to the position constants described above. These values are combined into a simple numerator and denominator to scale velocities to internal velocity units. This scaling also properly handles remainders (i.e. when used on a reference or feedback, accumulate the remainder and add it to subsequent velocity values, and when used with a limit, round up or down). It is possible to change these values
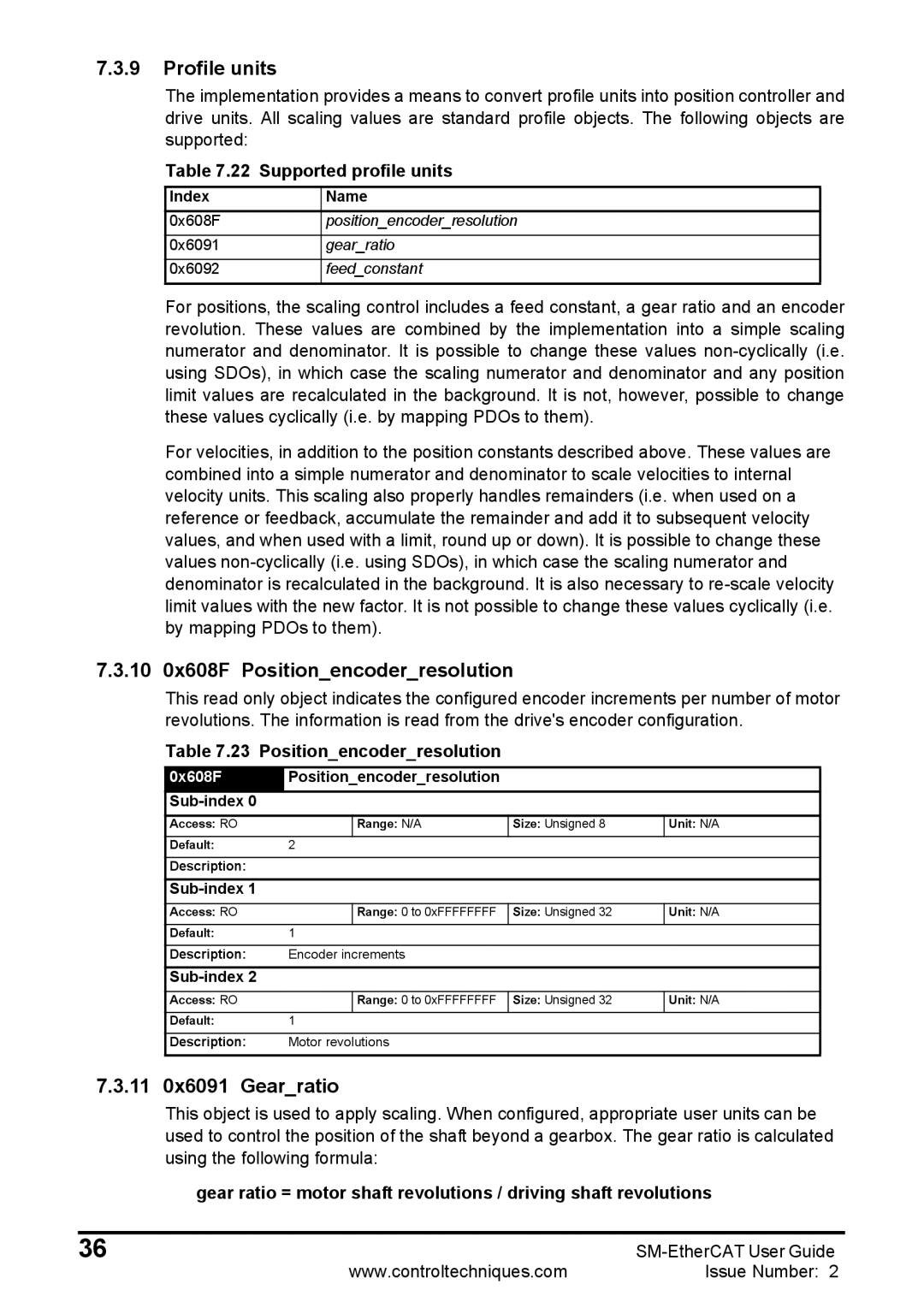
7.3.100x608F Position_encoder_resolution
This read only object indicates the configured encoder increments per number of motor revolutions. The information is read from the drive's encoder configuration.
Table 7.23 Position_encoder_resolution
0x608F | Position_encoder_resolution |
|
| |
|
|
|
| |
Access: RO |
| Range: N/A | Size: Unsigned 8 | Unit: N/A |
|
|
|
|
|
Default: | 2 |
|
|
|
|
|
|
|
|
Description: |
|
|
|
|
|
|
|
| |
Access: RO |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
|
|
| |
Description: | Encoder increments |
|
| |
|
|
|
|
|
|
|
|
| |
Access: RO |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: N/A |
|
|
|
|
|
Default: | 1 |
|
|
|
|
|
|
| |
Description: | Motor revolutions |
|
| |
7.3.110x6091 Gear_ratio
This object is used to apply scaling. When configured, appropriate user units can be used to control the position of the shaft beyond a gearbox. The gear ratio is calculated using the following formula:
gear ratio = motor shaft revolutions / driving shaft revolutions
36 | |
www.controltechniques.com | Issue Number: 2 |