7.6.2 0x6075 Motor_rated_current |
|
| ||||
| This object indicates the configured motor rated current. It is taken from the motor’s | |||||
| ||||||
| rms | |||||
| of this object is given in mA. |
|
| |||
| Table 7.49 0x6075 Motor_rated_current |
|
| |||
| 0x6075 | Motor_rated_current |
|
| ||
| Access: RO |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: mA |
|
|
|
|
|
|
|
|
| Default: | 0 |
|
|
|
|
|
|
|
|
| ||
| Description: | Indicates the configured motor rated current (Pr 5.07). |
|
| ||
|
|
|
|
|
|
|
7.6.3 0x6078 Current_actual_value
This object provides the actual value of the current. It shall correspond to the current in the motor. The value of this object is given per thousand of rated current.
Table 7.50 0x6078 Current_actual_value
0x6078 | Current_actual_value |
| ||
Access: RO |
| Range: | Size: Signed 16 | Unit: 0.1% of rated current |
|
|
|
|
|
Default: | 0 |
|
|
|
|
|
| ||
Description: | Provides the actual value of the current. |
| ||
7.6.4 0x6087 Torque_slope
This object indicates the configured rate of change of torque. The value of this object is given in units of per thousand of rated torque per second.
Table 7.51 Torque_slope
0x6087 | Torque_slope |
| ||
Access: RW |
| Range: 0 to 0xFFFFFFFF | Size: Unsigned 32 | Unit: 0.1% of rated torque per second |
Default: | 0 |
|
|
|
Description: Indicates the configured rate of change of torque.
7.7Homing Mode
This section describes the method by which a drive seeks the home position (also called, the datum, reference point or zero point).
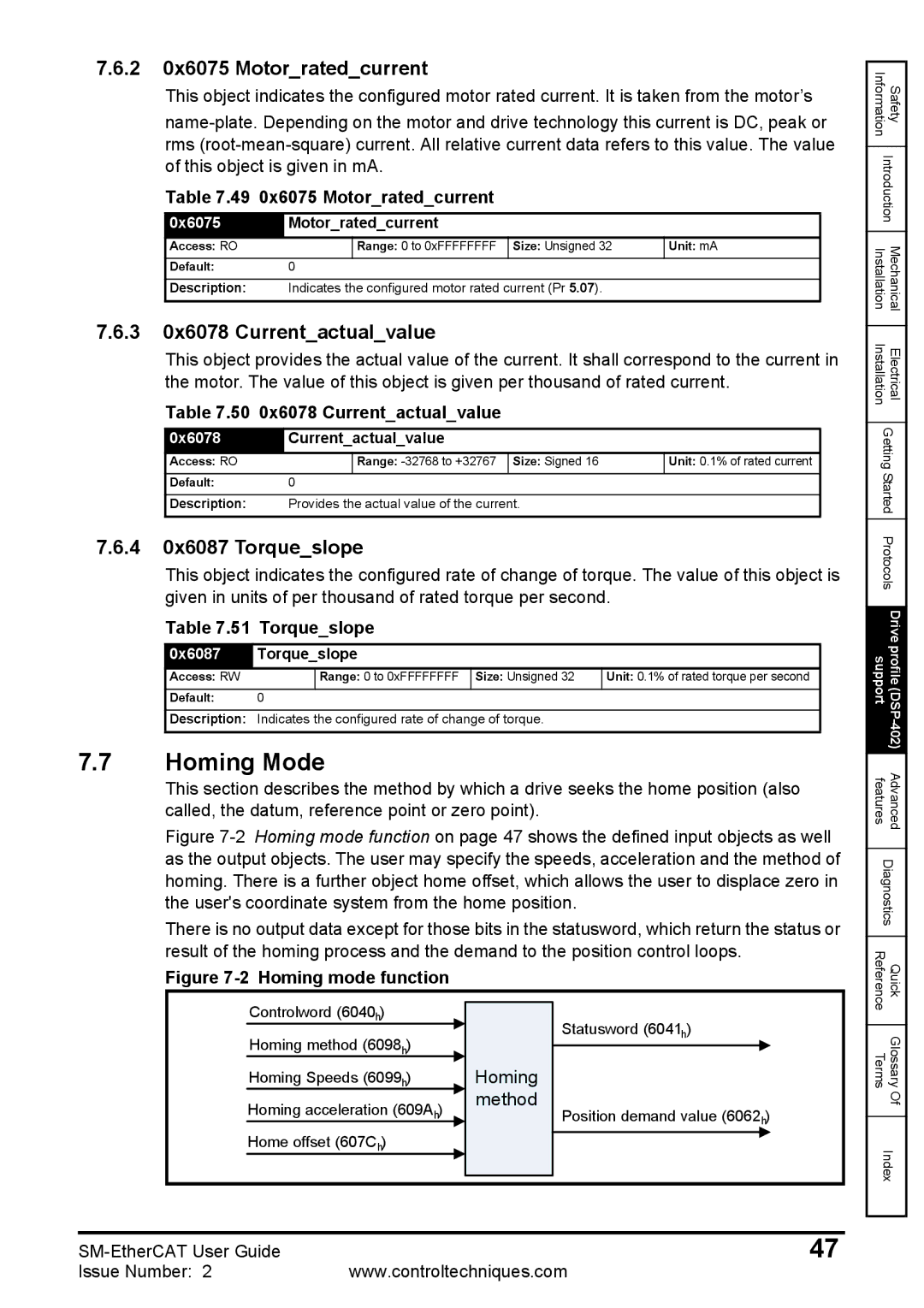
Figure 7-2 Homing mode function on page 47 shows the defined input objects as well as the output objects. The user may specify the speeds, acceleration and the method of homing. There is a further object home offset, which allows the user to displace zero in the user's coordinate system from the home position.
There is no output data except for those bits in the statusword, which return the status or result of the homing process and the demand to the position control loops.
Figure 7-2 Homing mode function
Information | Safety | |
| ||
Introduction | ||
|
| |
Installation | Mechanical | |
|
| |
Installation | Electrical | |
| ||
Getting Started | ||
| ||
Protocols | ||
|
| |
support | Drive profile | |
|
| |
features | Advanced | |
| ||
Diagnostics | ||
|
| |
Reference | Quick | |
Controlword (6040h)
Homing method (6098h)
Homing Speeds (6099h)
Homing acceleration (609Ah)
Home offset (607Ch)
Homing method
Statusword (6041h)
Position demand value (6062h)
Glossary Terms |
Of |
|
Index |
47 | |
Issue Number: 2 | www.controltechniques.com |