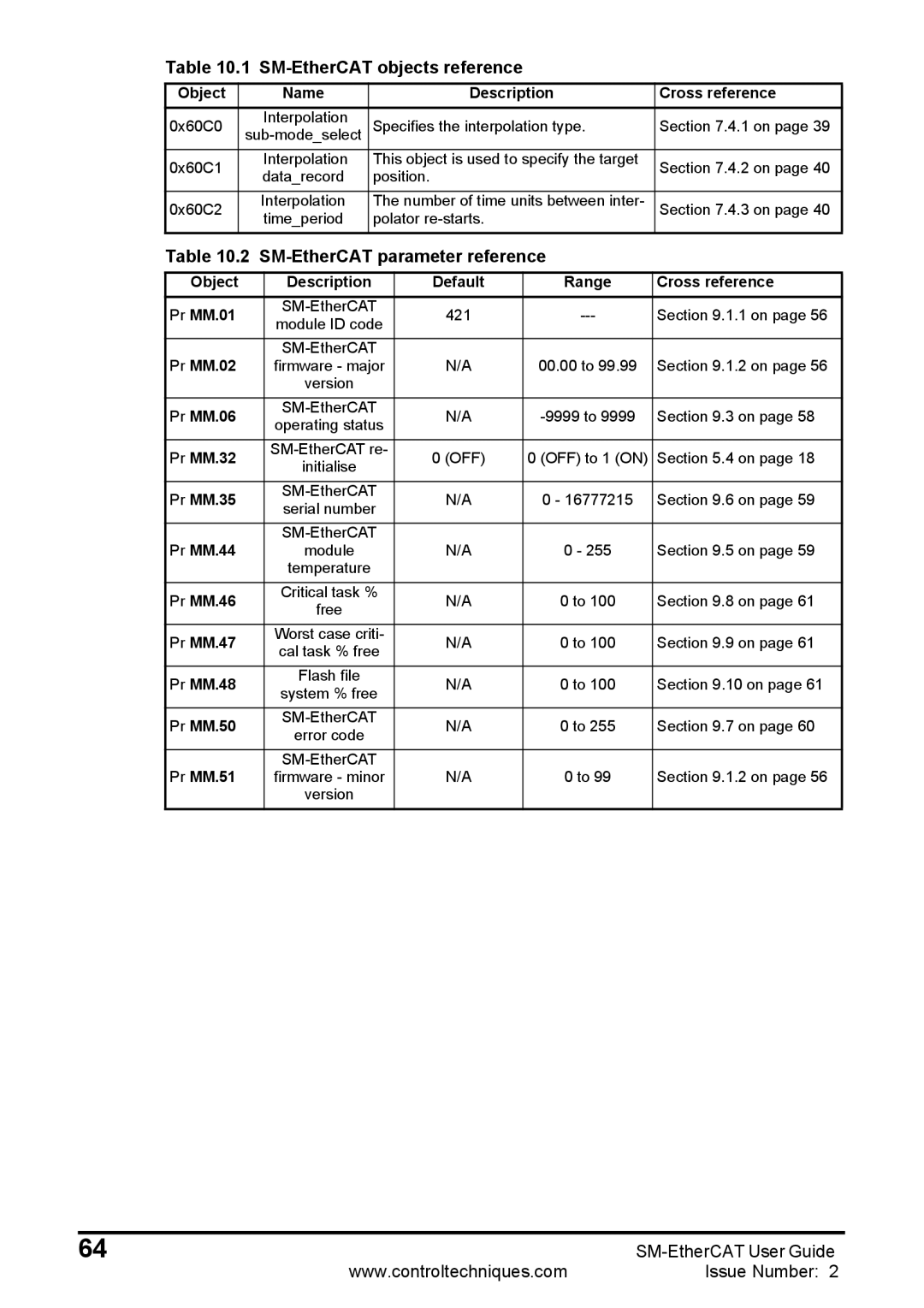
Table 10.1 SM-EtherCAT objects reference
Object | Name | Description | Cross reference | |
0x60C0 | Interpolation | Specifies the interpolation type. | Section 7.4.1 on page 39 | |
|
|
|
| |
0x60C1 | Interpolation | This object is used to specify the target | Section 7.4.2 on page 40 | |
data_record | position. | |||
|
| |||
0x60C2 | Interpolation | The number of time units between inter- | Section 7.4.3 on page 40 | |
| time_period | polator |
|
Table 10.2 SM-EtherCAT parameter reference
Object | Description | Default | Range | Cross reference | |
Pr MM.01 | 421 | Section 9.1.1 on page 56 | |||
module ID code | |||||
|
|
|
| ||
|
|
|
|
| |
Pr MM.02 | N/A | 00.00 to 99.99 | Section 9.1.2 on page 56 | ||
firmware - major | |||||
| version |
|
|
| |
|
|
|
|
| |
Pr MM.06 | N/A | Section 9.3 on page 58 | |||
operating status | |||||
|
|
|
| ||
|
|
|
|
| |
Pr MM.32 | 0 (OFF) | 0 (OFF) to 1 (ON) | Section 5.4 on page 18 | ||
initialise | |||||
|
|
|
| ||
Pr MM.35 | N/A | 0 - 16777215 | Section 9.6 on page 59 | ||
serial number | |||||
|
|
|
| ||
|
|
|
|
| |
Pr MM.44 | N/A | 0 - 255 | Section 9.5 on page 59 | ||
module | |||||
| temperature |
|
|
| |
|
|
|
|
| |
Pr MM.46 | Critical task % | N/A | 0 to 100 | Section 9.8 on page 61 | |
free | |||||
|
|
|
| ||
|
|
|
|
| |
Pr MM.47 | Worst case criti- | N/A | 0 to 100 | Section 9.9 on page 61 | |
cal task % free | |||||
|
|
|
| ||
Pr MM.48 | Flash file | N/A | 0 to 100 | Section 9.10 on page 61 | |
system % free | |||||
|
|
|
| ||
|
|
|
|
| |
Pr MM.50 | N/A | 0 to 255 | Section 9.7 on page 60 | ||
error code | |||||
|
|
|
| ||
|
|
|
|
| |
Pr MM.51 | N/A | 0 to 99 | Section 9.1.2 on page 56 | ||
firmware - minor | |||||
| version |
|
|
| |
|
|
|
|
|
64 |
|
www.controltechniques.com | Issue Number: 2 |