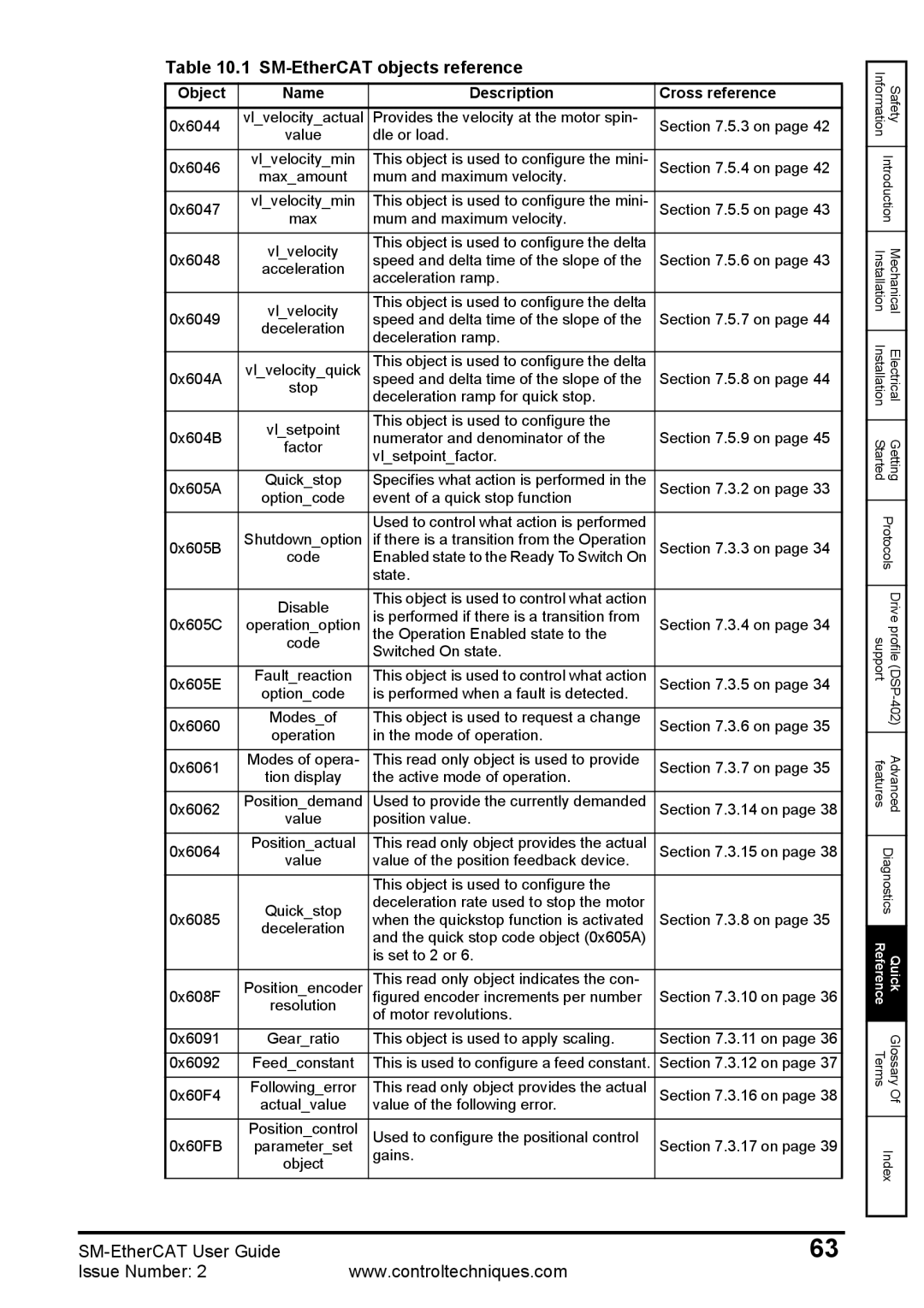
Table 10.1 SM-EtherCAT objects reference
Object | Name | Description | Cross reference | |
0x6044 | vl_velocity_actual | Provides the velocity at the motor spin- | Section 7.5.3 on page 42 | |
value | dle or load. | |||
|
| |||
|
|
|
| |
0x6046 | vl_velocity_min | This object is used to configure the mini- | Section 7.5.4 on page 42 | |
| max_amount | mum and maximum velocity. |
| |
0x6047 | vl_velocity_min | This object is used to configure the mini- | Section 7.5.5 on page 43 | |
| max | mum and maximum velocity. |
| |
0x6048 | vl_velocity | This object is used to configure the delta | Section 7.5.6 on page 43 | |
speed and delta time of the slope of the | ||||
acceleration | ||||
| acceleration ramp. |
| ||
|
|
| ||
|
|
|
| |
0x6049 | vl_velocity | This object is used to configure the delta | Section 7.5.7 on page 44 | |
speed and delta time of the slope of the | ||||
deceleration | ||||
| deceleration ramp. |
| ||
|
|
| ||
|
|
|
| |
0x604A | vl_velocity_quick | This object is used to configure the delta | Section 7.5.8 on page 44 | |
speed and delta time of the slope of the | ||||
| stop | deceleration ramp for quick stop. |
| |
|
|
| ||
|
|
|
| |
0x604B | vl_setpoint | This object is used to configure the | Section 7.5.9 on page 45 | |
numerator and denominator of the | ||||
factor | ||||
| vl_setpoint_factor. |
| ||
|
|
| ||
|
|
|
| |
0x605A | Quick_stop | Specifies what action is performed in the | Section 7.3.2 on page 33 | |
| option_code | event of a quick stop function |
| |
|
| Used to control what action is performed |
| |
0x605B | Shutdown_option | if there is a transition from the Operation | Section 7.3.3 on page 34 | |
code | Enabled state to the Ready To Switch On | |||
|
| state. |
| |
|
|
|
| |
| Disable | This object is used to control what action |
| |
| is performed if there is a transition from |
| ||
0x605C | operation_option | Section 7.3.4 on page 34 | ||
| code | the Operation Enabled state to the |
| |
| Switched On state. |
| ||
|
|
| ||
0x605E | Fault_reaction | This object is used to control what action | Section 7.3.5 on page 34 | |
| option_code | is performed when a fault is detected. |
| |
0x6060 | Modes_of | This object is used to request a change | Section 7.3.6 on page 35 | |
operation | in the mode of operation. | |||
|
| |||
|
|
|
| |
0x6061 | Modes of opera- | This read only object is used to provide | Section 7.3.7 on page 35 | |
tion display | the active mode of operation. | |||
|
| |||
0x6062 | Position_demand | Used to provide the currently demanded | Section 7.3.14 on page 38 | |
| value | position value. |
| |
0x6064 | Position_actual | This read only object provides the actual | Section 7.3.15 on page 38 | |
| value | value of the position feedback device. |
| |
|
| This object is used to configure the |
| |
0x6085 | Quick_stop | deceleration rate used to stop the motor | Section 7.3.8 on page 35 | |
when the quickstop function is activated | ||||
deceleration | ||||
| and the quick stop code object (0x605A) |
| ||
|
|
| ||
|
| is set to 2 or 6. |
| |
|
|
|
| |
| Position_encoder | This read only object indicates the con- |
| |
0x608F | figured encoder increments per number | Section 7.3.10 on page 36 | ||
| resolution | of motor revolutions. |
| |
|
|
| ||
|
|
|
| |
0x6091 | Gear_ratio | This object is used to apply scaling. | Section 7.3.11 on page 36 | |
|
|
|
| |
0x6092 | Feed_constant | This is used to configure a feed constant. | Section 7.3.12 on page 37 | |
|
|
|
| |
0x60F4 | Following_error | This read only object provides the actual | Section 7.3.16 on page 38 | |
| actual_value | value of the following error. |
| |
0x60FB | Position_control | Used to configure the positional control | Section 7.3.17 on page 39 | |
parameter_set | gains. | |||
| object |
| ||
|
|
| ||
|
|
|
|
Information | Safety |
| |
Introduction | |
|
|
Installation | Mechanical |
|
|
Installation | Electrical |
|
|
Started | Getting |
| |
Protocols | |
|
|
support | Drive profile |
|
|
features | Advanced |
| |
Diagnostics | |
|
|
Reference | Quick |
|
|
Terms | Glossary |
| Of |
| |
Index | |
|
|
63 | |
Issue Number: 2 | www.controltechniques.com |