Marine Radar
00080918202
Safety Instructions
Table of Contents
Iii
Plotter Operation
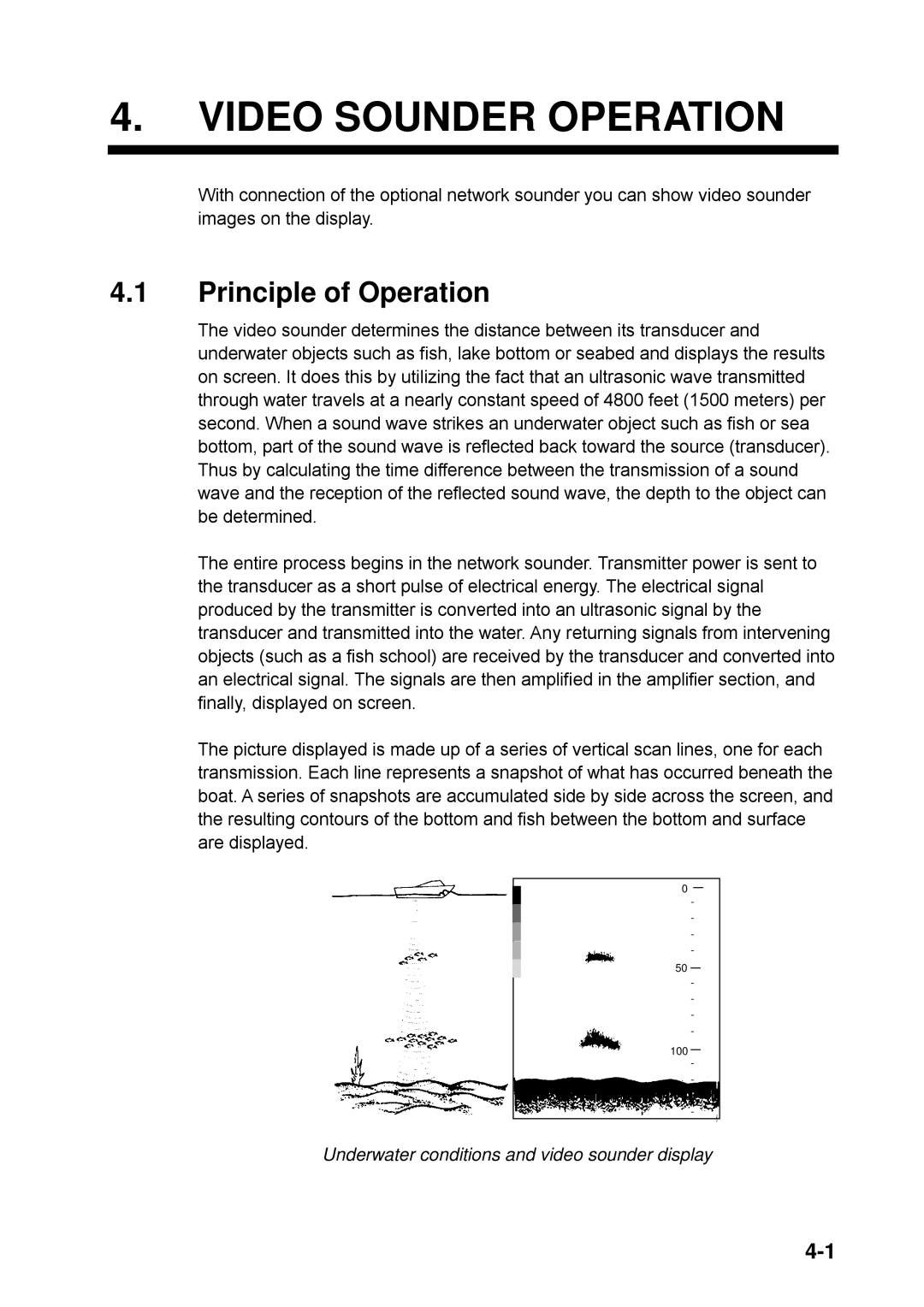
Video Sounder Operation
Customizing Your Unit
Data Transfer
Vii
Viii
Foreword
Features
NavNet system
NavNet system
Two-unit NavNet system
Two-unit NavNet system
Three-or more unit NavNet system
Xii
What is WAAS?
Operational Overview
Control panel
Operating Controls
Display unit controls
Overview of display unit controls
Soft keys
Display unit
Plotter display
Enter knob
Enter knob Alphabet, symbol, numeric
Center
Remote controller
Chart card and card remover
Inserting a Chart Card
Startup test
Turning the Unit On/Off
Cursor, cursor data
Cursor Pad, Cursor
Display brilliance and panel brilliance windows
Brilliance adjustment soft keys
Display Brilliance, Panel Brilliance, Contrast, Hue
Display brilliance, panel brilliance
Contrast window
Day Night Twilight Applicable mode
Contrast
Hue MODEL1722C/1723C series
Screen type and available display screen
Selecting a Display
Display modes
Display screens
Selecting a display
Full-screen selection window overlay for color model
Radar combination screen selection window
12 3nm
Switching control in combination and overlay screens
Selecting radar source
Select source menu
Radar source and sounder source windows
Temporarily erasing a data box
Data Boxes
Showing, hiding data boxes with soft key
Rearranging data boxes
Executing a function
Function Keys
Internally generated echoes
Simulation setup menu
Simulation Display
Radar
Plotter
Antenna unit-generated echoes
Sounder
This page is intentionally left blank
Radar display
Radar Display
Transmitting, Stand-by
Tuning
Adjusting the Gain
Tuning window
Gain sensitivity window
Gain adjustment soft keys
How the A/C SEA works
Adjusting A/C SEA
SEA setting window
Reducing Sea Clutter
Adjusting the A/C Rain
Rain setting window
Reducing Precipitation Clutter
FTC setting window
Adjusting the FTC
Range Scale
Range scales nm, sm
Range scales km
Pulselength
Signal process soft keys
Presentation Mode
Selecting a presentation mode
Radar display soft keys
Head-up
Head-up presentation mode
Course-up presentation mode
Description of presentation modes
True motion
North-up presentation mode
True motion presentation mode
North-up
Measuring range by range rings
Measuring the Range
Measuring range by cursor
How to measure range and bearing to a target with the cursor
How to measure range with the VRM
Measuring range by VRM
EBL/VRM soft keys
Measuring the Bearing
Erasing an EBL, EBL indication
How to measure bearing with the EBL
Reducing Noise
Erasing the Heading Line, North Marker
Radar interference
Reducing Radar Interference
Zoom
Zoom
Zooming in on radar targets
Zooming ARP, TTM targets
Shifting the Picture
Manual shift
Target no. selection window
Shifting the picture manually
Setting automatic shift maximum speed
Auto ship speed setting window
Automatic shift
Using the Offset EBL
Predicting a collision course
Predicting collision course with the offset EBL
Measuring range and bearing between two targets
Measuring range & bearing between two targets
Trail soft keys
Echo Trails
Trail time
Sample echo trails
Multitone and monotone trails
Starting echo trails
Trail brilliance MODEL1722 series
Trail gradation MODEL1722C/1723C series
Trail color window
Trail color MODEL1722C/1723C series
Types of echo stretch
Echo Stretch
Effect of echo averaging
Echo Averaging
Target soft keys
Outputting TLL Data
Setting a guard alarm zone
Guard Alarm
Canceling the guard alarm
When the alarm is violated…
Turning on/off watchman
Setting watchman stand-by interval
Watchman
How watchman works
Waypoint marker
Waypoint Marker
ARP option, TTM operation
Usage precautions for ARP
ARP setup menu
Activating/deactivating ARP, TTM
ARP target info window
Automatic acquisition
ARP plot symbols
Acquiring and tracking targets ARP only
Manual acquisition
Displaying target number internal, external ARP
Automatic acquisition area
ARP target number
Terminating tracking of all targets
Cancel all targets window
Terminating tracking of ARP targets
Terminating tracking of selected targets
Setting vector attributes ARP
What is a vector?
Vector reference, vector time
Displaying past position display ARP
Past position displays
History interval window
ARP target data
25.7 ARP, TTM target data
CPA window
25.8 CPA/TCPA alarm ARP
Lost target mark
Lost target alarm ARP
Canceling a lost target
Tcpa window
Interpreting the Radar Display
General
Minimum and maximum ranges
Bearing accuracy
Radar resolution
Bearing resolution
Range resolution
Sidelobe echoes
False echoes
Multiple echoes
Multiple echoes
Shadow sectors
Virtual image
Virtual image
Shadow sectors
Sart Search and Rescue Transponder
Appearance of Sart signal on the radar display
General remarks on receiving Sart
General procedure for detecting Sart response
Rain control
Appearance of racon signal on the radar display
Racon Radar Beacon
SEA control
Plotter Displays
Full-screen plotter display
Full-screen plotter display
Nav data window
Contents of nav data window
Compass display
Compass display
XTE range setting window
Reading the XTE cross-track error monitor
Highway display
Highway display
Nav data displays
Nav data display
North-up
Plotter display, north-up mode
Plotter display, course-up mode, destination set
Plotter display, auto course-up mode
Course-up
Auto course-up
Chart Scale
Charts scales
Shifting the Display
Chart Cards
Chart card overview
Chart icons and their meanings
Indices and chart enlargement
Sample chart Japan showing indices
When a chart cannot be displayed
Furuno and NavCharts
Chart symbols
Data for aids to navigation
Port service icons NavCharts only
Plotter display, showing port service display
Current or tide data
Example of caution area window
MAP cards
Cursor and data display
Objects window
Icon data
Lighthouse icon
Object windows
Tide information
Sample lighthouse data
Port service icons
Tide window
Date window
Track control menu
Working with Track
Displaying track
Own ship track
Stopping, restarting plotting of own ship track
Target track
Track control menu MODEL1722C/1723C series
Changing track color MODEL1722C/1723C series
Own ship’s track
Own ship track color window
Track plotting interval
Track plotting method and interval for own ship track
Track plotting method
Plot window
Memory track & mark window
Changing own ship track/mark distribution setting
Erasing track
Erasing own ship track by area
Erase menu
Erasing all target tracks
Erasing own ship track by color color model
Erase track by color window
Erasing all own ship track
Mark shapes
Marks, Lines
Entering a mark
Changing mark attributes
Mark shape window
Selecting line type
Erasing an individual line
Erasing marks, lines
Line style window
Erasing an individual mark
Erasing all marks, lines
Entering a waypoint with the cursor
Waypoints
Entering waypoints
Entering a waypoint at own ship position
Waypoint mark color selection window
Waypoint mark shape selection window
Entering a waypoint by range and bearing
Editing waypoint data from the waypoint list
Editing waypoint data
Entering a waypoint from the waypoint list
Alphanumeric and local waypoint lists
Editing a waypoint from the plotter display
Erasing waypoints
Erasing a waypoint with the cursor
Erasing a waypoint from the waypoint list
Chart details menu
Changing waypoint mark size FURUNO, NavCharts
Alphanumeric list
Searching waypoints
Route menu
Routes
Creating routes
Entering a route with existing waypoints
Entering a route with the cursor
Creating voyage-based routes
Save route menu
Save route window
Displays for entry of time, distance interval
For manual entry of waypoints, do the following
To stop recording waypoints and save the route
Connect route window
Connecting routes
Waypoint list for editing a route local list
Inserting waypoints
Inserting waypoint from the route list
Edit route menu
Inserting a waypoint in an intermediate location on a route
Inserting a waypoint from the plotter display
Removing a waypoint from the plotter display
Removing waypoints from a route
Erasing routes
Removing a waypoint from the route list
Goto method window
Navigation
Navigating to a quick point
Selecting quick point entry method
Selecting waypoint from the waypoint list
Navigating to waypoints
Navigating to multiple quick points
Selecting waypoint from the plotter display
Navigating to ports, port services NavCharts/C-MAP
Selecting an external waypoint
QP window
Sample filling station locations southern Italy
Port services and sample port list
Navigating route waypoints in reverse order
Following a route
Selecting the route to follow
Plotter display, route selected as destination
Example of when to restart navigation
Restarting navigation
Log display
Setting speed for ETA calculation
Switching waypoints
Select speed for ETA window
Canceling route navigation
Audio alarm window
Alarms
Audio alarm on/off
Plotter alarm menu
Arrival alarm
How the arrival alarm works
Arrival alarm window
Anchor watch alarm
How the anchor watch alarm works
Anchor watch alarm window
XTE alarm window
XTE Cross Track Error alarm
Speed alarm
How the XTE alarm works
Proximity alarm
Proximity alarm window
Proximity mark
Trip alarm window
Trip alarm
Alarm menu
Alarm information
General setup menu,
Resetting Trip Distance
Alarm messages
Plotter alarm messages and their meanings
Entering the MOB Mark, Setting MOB as Destination
MOB concept
MOB mark messages
This page is intentionally left blank
Underwater conditions and video sounder display
Principle of Operation
Display mode window
Sounder Displays
Selecting a sounder display
Single frequency display
Description of sounder displays
Sounding area and transmission frequency
Dual-frequency display
Dual-frequency display LF picture
HF picture
Bottom-zoom display plus normal sounder display
Marker-zoom display
Marker-zoom display plus normal sounder display
Bottom-zoom display
Bottom discrimination display
Bottom-lock display
Bottom-lock display plus normal sounder display
Bottom discrimination display
Selecting screen split method in combination displays
Scope display display only
Scope display
How the automatic sounder works
How to enable automatic sounder operation
Auto mode window
Automatic Sounder Operation
Selecting display range
Selecting the manual mode
Adjusting the gain
Manual Sounder Operation
Range shifting
Gain window
Shift concept
Measuring Depth, Time
How to use the VRM, time cursor
Reducing Interference
Types of interference
Noise limiter window
Reducing Low Level Noise
Appearance of clutter
Clutter window
Signal level window
Erasing Weak Echoes
Appearance of weak echoes
White marker window
White Marker MODEL1722C/1723C series
Picture Advance Speed
Advancement independent of ship’s speed
Picture advance window
Advancement synchronized with ship’s speed
How the speed-dependent picture advance mode works
Hue no. and background and echo colors
Display Colors MODEL1722C/1723C series
Sounder alarm menu
Fish alarm window
Bottom alarm
Fish alarm
Bottom alarm window
Fish alarm B/L window
Fish alarm B/L
Water temperature alarm window
Water temperature alarm
Fish Alarm
When an alarm setting is violated
Water Temperature Graph
Sounder alarm messages and their meanings
Changing Pulse Repetition Rate
Zero line
Interpreting the Sounder Display
Zero line
Bottom echo
Surface noise/aeration
Fish school echoes
Surface noise/Aeration
Fish school echoes
General setup menu
General Setup
Description Settings Default Setting
Contents of general menu
Radar Setup
Radar display setup
Radar display setup menu
On next
Contents of radar setting menu
Contents of radar setting menu con’t from previous
Radar range setup menu
Radar range setup
Radar function key options
Function key setup
Default Function Function Key Label
Radar function key menu
Menu Item Function
Radar function keys
Plotter Setup
Display option menu Contents of display option menu
Navigation options
Default Function
Plotter function key menu
Plotter function key options
RUL Ruler
Plotter function keys
Chart Setup
Chart offset
Plotter display, chart offset selected
Chart details menu FURUNO, Nav-Charts
FURUNO, Nav-Chartschart attributes
Description Settings
Contents of chart details menu FURUNO, NavCharts
Cntour Line soft key
Contour line menu FURUNO, Nav-Charts
Chart details menu C-map
MAP chart attributes
Contents of chart details menu C-map
Settings description
Contents of C-MAP chart details menu from previous
Depth info menu C-map
Depth Info soft key
Data box menu
Data Boxes Setup
Hot Page Setup
Hot page setup menu
Full-screen selection window Ovrly for color model only
Combination screen selection window
Navigation data source
Navigator Setup
Contents of nav setup menu
Description Settings Default
GPS sensor setup menu Contents of GPS setup menu
GPS receiver setup Set equipped with GP-310B/320B
GPS Status
Contents of GPS sensor setup menu con’t from previous
Contents of Waas Setup menu
Waas Setup
Loran GRI & station pair window
TD display setup
TD setup menu
Displaying Loran C TDs
Decca chain and station pair window
Displaying Decca TDs
Nav Data Display Setup
Nav data setup screen
Nav data setup window
Sounder system setup menu description
Sounder Setup
System setup
Sounder system setup menu
TVG
Sounder system setup menu description con’t
Settings Default Setting
Sensor setup
Sensor setup menu
Sensor setup menu settings
Range
Sounder range setup menu
Default ranges
Sounding range, zoom range, bottom lock range
Sounder function key options
Sounder function key menu
Sounder function keys
Change this setting
This page is intentionally left blank
Memory Card Operations
Formatting memory cards
Save data menu
Saving data to a memory card
Memory card messages
Memory card messages
Message Reason Remedy
Load data menu
Playing back data from a memory card
Upload and download menus
Setting communication software on the PC
Uploading, Downloading Data
Uploading or downloading data
Characters available for comment
Baud rate window
Waypoint data format
Waypoint data format
Route data menu
Route comment data format
End of sentence
Loading Waypoint Data from Yeoman
Marks & lines window
Receiving Data Via Network Equipment
Receive data menu
Host name window
Select sentence menu
Outputting Data Through the Network
Preventive Maintenance
Maintenance program
Check point Remedy
Replacement of Fuse
Replacement of Battery
Parts Name Type Code No
Simple Troubleshooting
General troubleshooting
If… Then…
Radar troubleshooting
Radar
If… But… Then…
Plotter
Plotter troubleshooting
Sounder
Sounder troubleshooting
Diagnostics
Memory I/O test
Test & memory clear menu
GPS receiver test results
Display unit test
Display unit test results ex. MODEL1722C series
GPS sensor test
Network sounder ETR-6/10N, ETR-30N test
Network sounder test results
ARP test
Test patterns
Test pattern
Screen for testing keyboard, remote controller
Keyboard, remote controller test
GPS status display
GPS Status Display
Clearing Memories
Memory clear menu
Windows for clearing memory
Equipment status error messages
Error Messages
Menu Overview
Menu key
AP-1
Interval TIME, Distance
AP-2
AP-3
AP-4
Zoom Marker ON, OFF
AP-5
AP-6
System configuration
AP-7
GPS Sensor Settings
DD MM. MMM
AP-8
Radar Simulation Data YES, no
AP-9
AP-10
AP-11
Alarm key
AP-12
Geodetic Chart List
AP-13
World Time Chart
AP-14
Icons
Specifications of Marine Radar
Transceiver Module
Display Unit
Plotter Function
Environmental Condition
This page is intentionally left blank
Index-1
Index
Index
Index-2
Interference rejection
Index-3
Index-4
Satellite disable GPS Receiver GP-310B
Index-5
Switching in route navigation
Page