Issue 10/06 | 6 Commissioning |
6.4.18.9PID controller
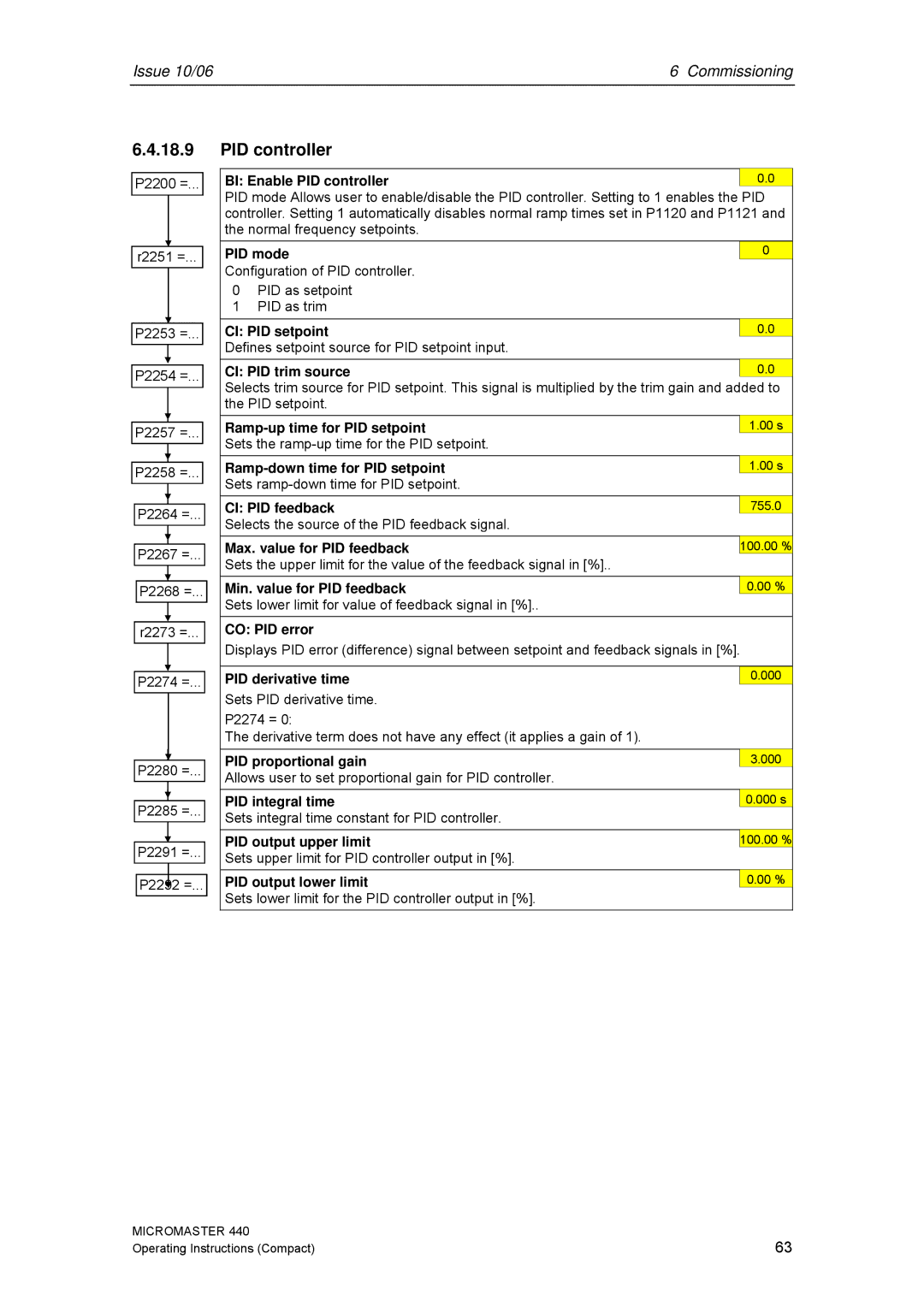
P2200 =...
r2251 =...
P2253 =...
P2254 =...
P2257 =...
P2258 =...
P2264 =...
P2267 =...
P2268 =...
r2273 =...
P2274 =...
P2280 =...
P2285 =...
P2291 =...
P2292 =...
BI: Enable PID controller | 0.0 |
PID mode Allows user to enable/disable the PID controller. Setting to 1 enables the PID controller. Setting 1 automatically disables normal ramp times set in P1120 and P1121 and the normal frequency setpoints.
PID mode | 0 | |
Configuration of PID controller. |
| |
0 | PID as setpoint |
|
1 | PID as trim |
|
CI: PID setpoint | 0.0 | |
Defines setpoint source for PID setpoint input. |
| |
|
| |
CI: PID trim source | 0.0 | |
Selects trim source for PID setpoint. This signal is multiplied by the trim gain and added to the PID setpoint.
1.00 s | |
Sets the |
|
1.00 s | |
Sets |
|
|
|
CI: PID feedback | 755.0 |
Selects the source of the PID feedback signal. |
|
Max. value for PID feedback | 100.00 % |
Sets the upper limit for the value of the feedback signal in [%].. |
|
|
|
Min. value for PID feedback | 0.00 % |
Sets lower limit for value of feedback signal in [%].. |
|
CO: PID error
Displays PID error (difference) signal between setpoint and feedback signals in [%].
PID derivative time | 0.000 |
Sets PID derivative time. |
|
P2274 = 0: |
|
The derivative term does not have any effect (it applies a gain of 1). |
|
|
|
PID proportional gain | 3.000 |
Allows user to set proportional gain for PID controller. |
|
|
|
PID integral time | 0.000 s |
Sets integral time constant for PID controller. |
|
|
|
PID output upper limit | 100.00 % |
Sets upper limit for PID controller output in [%]. |
|
|
|
PID output lower limit | 0.00 % |
Sets lower limit for the PID controller output in [%]. |
|
MICROMASTER 440 | 63 |
Operating Instructions (Compact) |