Issue 10/06 | 6 Commissioning |
6.4.17.1
P1300=20
P1452 = ...
P1470 = ...
P1472 = ...
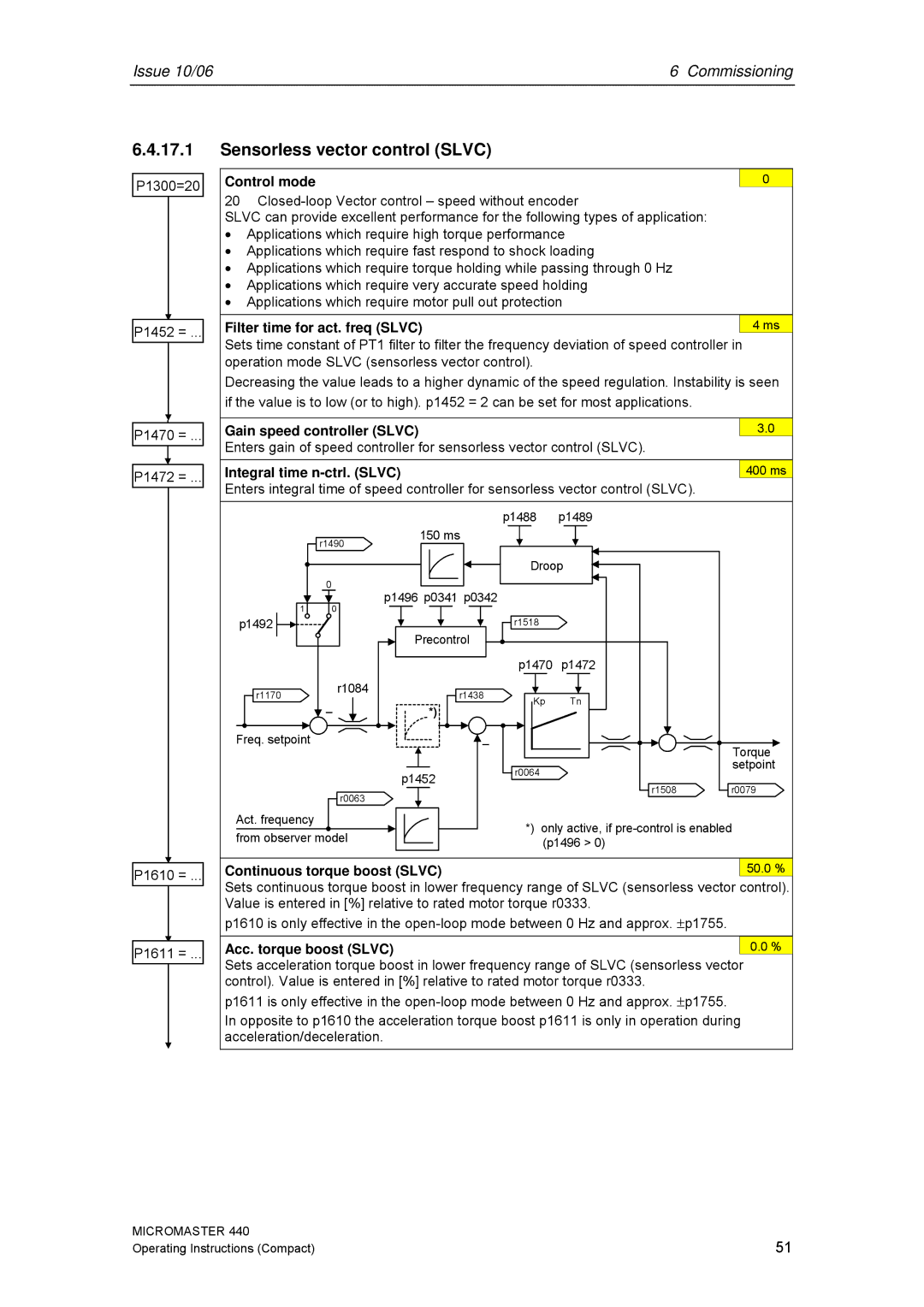
Sensorless vector control (SLVC)
Control mode | 0 |
20
SLVC can provide excellent performance for the following types of application:
•Applications which require high torque performance
•Applications which require fast respond to shock loading
•Applications which require torque holding while passing through 0 Hz
•Applications which require very accurate speed holding
•Applications which require motor pull out protection
Filter time for act. freq (SLVC) | 4 ms |
Sets time constant of PT1 filter to filter the frequency deviation of speed controller in operation mode SLVC (sensorless vector control).
Decreasing the value leads to a higher dynamic of the speed regulation. Instability is seen if the value is to low (or to high). p1452 = 2 can be set for most applications.
Gain speed controller (SLVC) | 3.0 |
Enters gain of speed controller for sensorless vector control (SLVC).
Integral time | 400 ms |
Enters integral time of speed controller for sensorless vector control (SLVC).
r1490
p1488 | p1489 |
150 ms
1
p1492 ![]()
![]()
![]()
r1170
Freq. setpoint
0
0
r1084
![]() –
–
r0063
| Droop |
| |
p1496 p0341 p0342 |
|
|
|
| r1518 |
|
|
Precontrol |
|
|
|
| p1470 | p1472 |
|
r1438 | Kp | Tn |
|
*) |
| ||
|
|
| |
– |
|
| Torque |
|
|
| |
p1452 | r0064 |
| setpoint |
|
| ||
| r1508 | r0079 | |
|
| ||
P1610 = ...
P1611 = ...
Act. frequency | *) | only active, if | ||
from observer model | ||||
| (p1496 > 0) | |||
|
| |||
|
|
|
| |
Continuous torque boost (SLVC) |
|
| 50.0 % | |
Sets continuous torque boost in lower frequency range of SLVC (sensorless vector control). Value is entered in [%] relative to rated motor torque r0333.
p1610 is only effective in the
Acc. torque boost (SLVC) | 0.0 % |
Sets acceleration torque boost in lower frequency range of SLVC (sensorless vector control). Value is entered in [%] relative to rated motor torque r0333.
p1611 is only effective in the
In opposite to p1610 the acceleration torque boost p1611 is only in operation during acceleration/deceleration.
MICROMASTER 440 | 51 |
Operating Instructions (Compact) |