6 Commissioning | Issue 10/06 |
Controller structures
These structures are selected using parameters P2200 and P2251.
|
|
|
| Setpoint via | RFG |
| |||
|
|
| SUM |
| PID controller | ||||
|
|
|
|
|
|
|
| ||
1 | P2200 | = 0:0 2) | VSD * |
| − | ON: | active | ON: | - |
| P2251 | = 0 |
|
|
| OFF1/3: | active | OFF1/3: | - |
2 | P2200 | = 1:0 2) | − |
| PID control | ON: | - | ON: | active |
| P2251 | = 0 |
|
|
| OFF1/3: | active | OFF1/3: | - |
3 | P2200 | = 0:0 1) | VSD * |
| − | ON: | active | ON: | - |
| P2251 | = 1 |
|
|
| OFF1/3: | active | OFF1/3: | - |
4 | P2200 | = 1:0 1) |
| Dancer control | ON: | active | ON: | active | |
P2251 | = 1 |
| OFF1/3: | active | OFF1/3: | active | |||
1) | will take change with drive running | * Variable speed drive (VSD) | |
2) | change only taken when drive stopped | ||
|
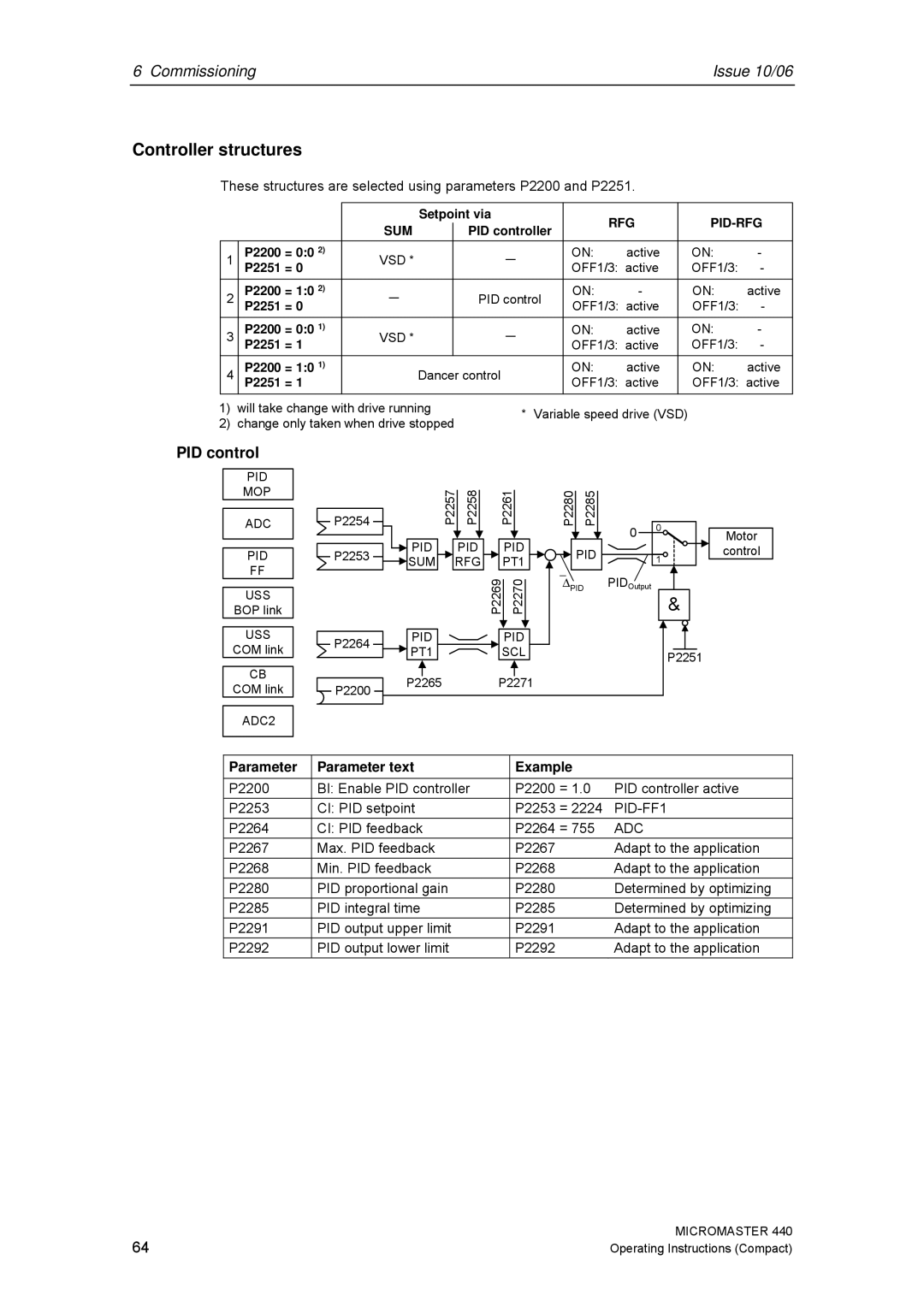
PID control
PID
MOP
ADC
PID
FF
USS
BOP link
USS
COM link
CB
COM link
ADC2
|
|
|
|
|
| P2257 |
| P2258 |
| |
P2254 |
|
|
| |||||||
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| PID |
|
|
| PID | |
|
|
|
|
|
|
| ||||
P2253 |
|
|
|
|
|
| ||||
|
| SUM |
|
| RFG | |||||
|
|
| ||||||||
|
|
|
|
|
|
| ||||
P2264 | PID | |
PT1 | ||
| ||
P2200 | P2265 | |
|
P2261 | P2280 | P2285 | ||
| PID |
| PID | |
| PT1 |
| ||
| − |
| ||
P2269 | P2270 |
| ||
∆PID | ||||
|
| |||
| PID |
|
| |
| SCL |
|
| |
P2271 |
|
| ||
0 | 0 |
| |
| 1 |
PIDOutput
&
P2251
Motor
control
Parameter | Parameter text | Example |
| |
P2200 | BI: Enable PID controller | P2200 | = 1.0 | PID controller active |
P2253 | CI: PID setpoint | P2253 = 2224 | ||
P2264 | CI: PID feedback | P2264 | = 755 | ADC |
P2267 | Max. PID feedback | P2267 |
| Adapt to the application |
P2268 | Min. PID feedback | P2268 |
| Adapt to the application |
P2280 | PID proportional gain | P2280 |
| Determined by optimizing |
P2285 | PID integral time | P2285 |
| Determined by optimizing |
P2291 | PID output upper limit | P2291 |
| Adapt to the application |
P2292 | PID output lower limit | P2292 |
| Adapt to the application |
64 | MICROMASTER 440 |
Operating Instructions (Compact) |