Issue 10/06 | 6 Commissioning |
6.4.15Encoder
P0400 =...
P0408 =...
P0491 =...
P0492 =...
P0494 =...
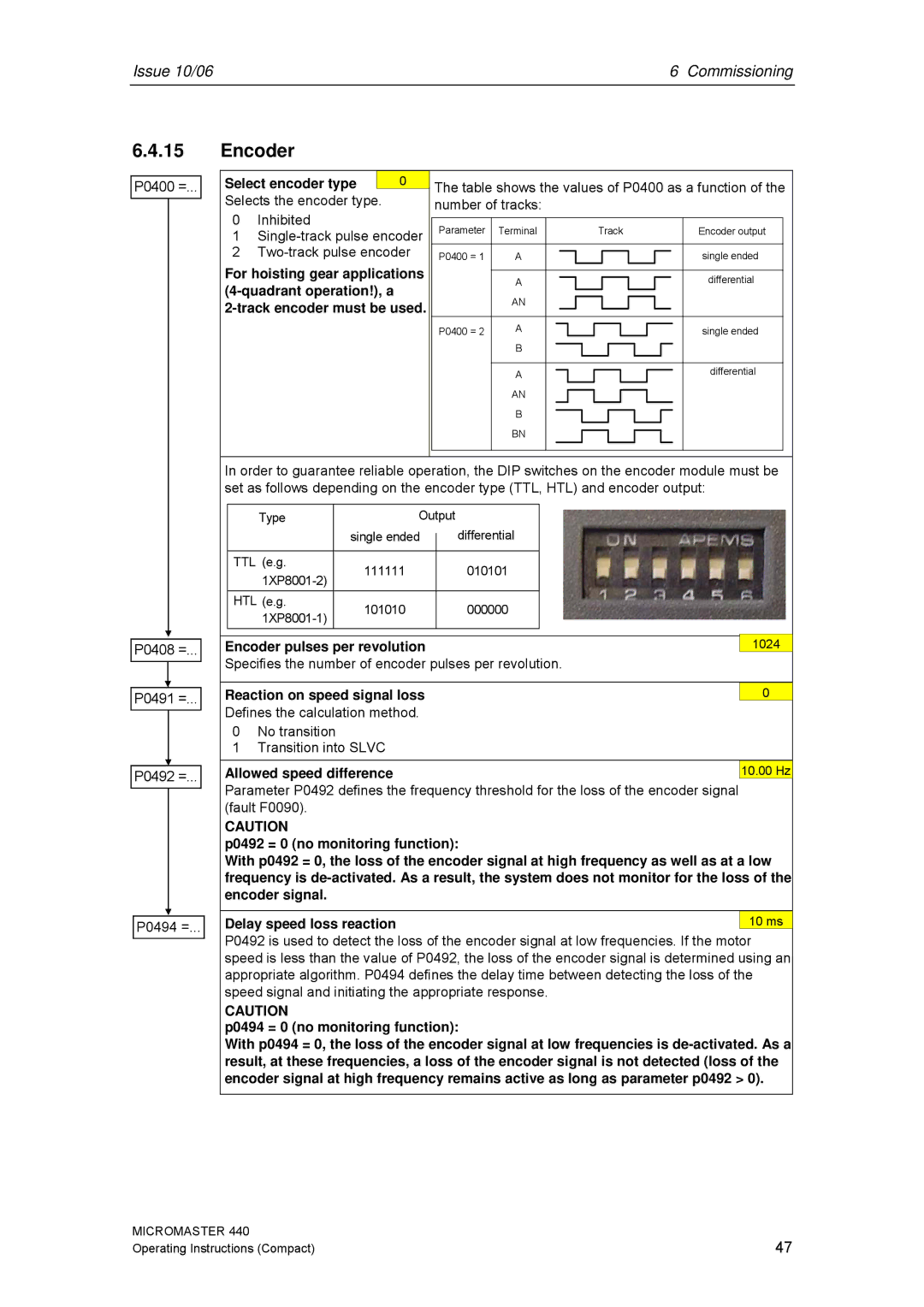
Select encoder type |
| 0 | The table shows the values of P0400 as a function of the | |||||||||||||||||||||
|
| |||||||||||||||||||||||
Selects the encoder type. |
| number of tracks: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
0 | Inhibited |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| Parameter | Terminal |
|
|
|
|
|
| Track |
|
|
|
|
|
|
| Encoder output |
| ||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
2 | P0400 = 1 | A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| single ended |
| |||
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||
For hoisting gear applications |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
| A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| differential |
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
| AN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
| P0400 = 2 | A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| single ended |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
| B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| differential |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
| AN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
| B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
| BN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
In order to guarantee reliable operation, the DIP switches on the encoder module must be set as follows depending on the encoder type (TTL, HTL) and encoder output:
|
| Type |
|
| Output |
|
|
| ||
|
|
|
| single ended |
|
| differential |
|
| |
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
| TTL | (e.g. |
| 111111 |
|
|
| 010101 |
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
| |
| HTL (e.g. |
| 101010 |
|
|
| 000000 |
|
| |
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
| |
|
|
| ||||||||
Encoder pulses per revolution |
| 1024 | ||||||||
Specifies the number of encoder pulses per revolution. | ||||||||||
|
|
| ||||||||
Reaction on speed signal loss |
|
| 0 | |||||||
Defines the calculation method. |
|
|
| |||||||
0 | No transition |
|
|
|
|
|
|
| ||
1 | Transition into SLVC |
|
|
|
|
|
| |||
|
|
|
|
|
|
| ||||
Allowed speed difference |
|
|
|
|
| 10.00 Hz | ||||
Parameter P0492 defines the frequency threshold for the loss of the encoder signal (fault F0090).
CAUTION
p0492 = 0 (no monitoring function):
With p0492 = 0, the loss of the encoder signal at high frequency as well as at a low frequency is
Delay speed loss reaction | 10 ms |
P0492 is used to detect the loss of the encoder signal at low frequencies. If the motor speed is less than the value of P0492, the loss of the encoder signal is determined using an appropriate algorithm. P0494 defines the delay time between detecting the loss of the speed signal and initiating the appropriate response.
CAUTION
p0494 = 0 (no monitoring function):
With p0494 = 0, the loss of the encoder signal at low frequencies is
MICROMASTER 440 | 47 |
Operating Instructions (Compact) |