Simrad AP26 and AP27 Autopilots
Note !
NAV
Note !
•The autopilot autosteering must be tested and determined satisfactory.
•The navigation receiver (GPS, Chart Plotter) must be in full operating mode with adequate signal characteristics for valid position and navigation data.
•At least one waypoint must be entered and selected as the current “Go to” waypoint.
•The navigation receiver (source) for the autopilot will be the one that is automatically selected in the interface
The autopilot is designed to steer in “mixed mode” operation. This combines the straight steering capability of cross track error (XTE) steering in conjunction with the turning capability of bearing mode steering (Course To Steer, CTS) and automatic waypoint shift.
If the autopilot is connected to a navigation receiver that does not transmit a message with bearing to next waypoint, it will pick a XTE message and steer on Cross Track Error only. In that case you have to revert to AUTO mode at each waypoint and manually change set course to equal bearing to next waypoint and then select NAV mode again.
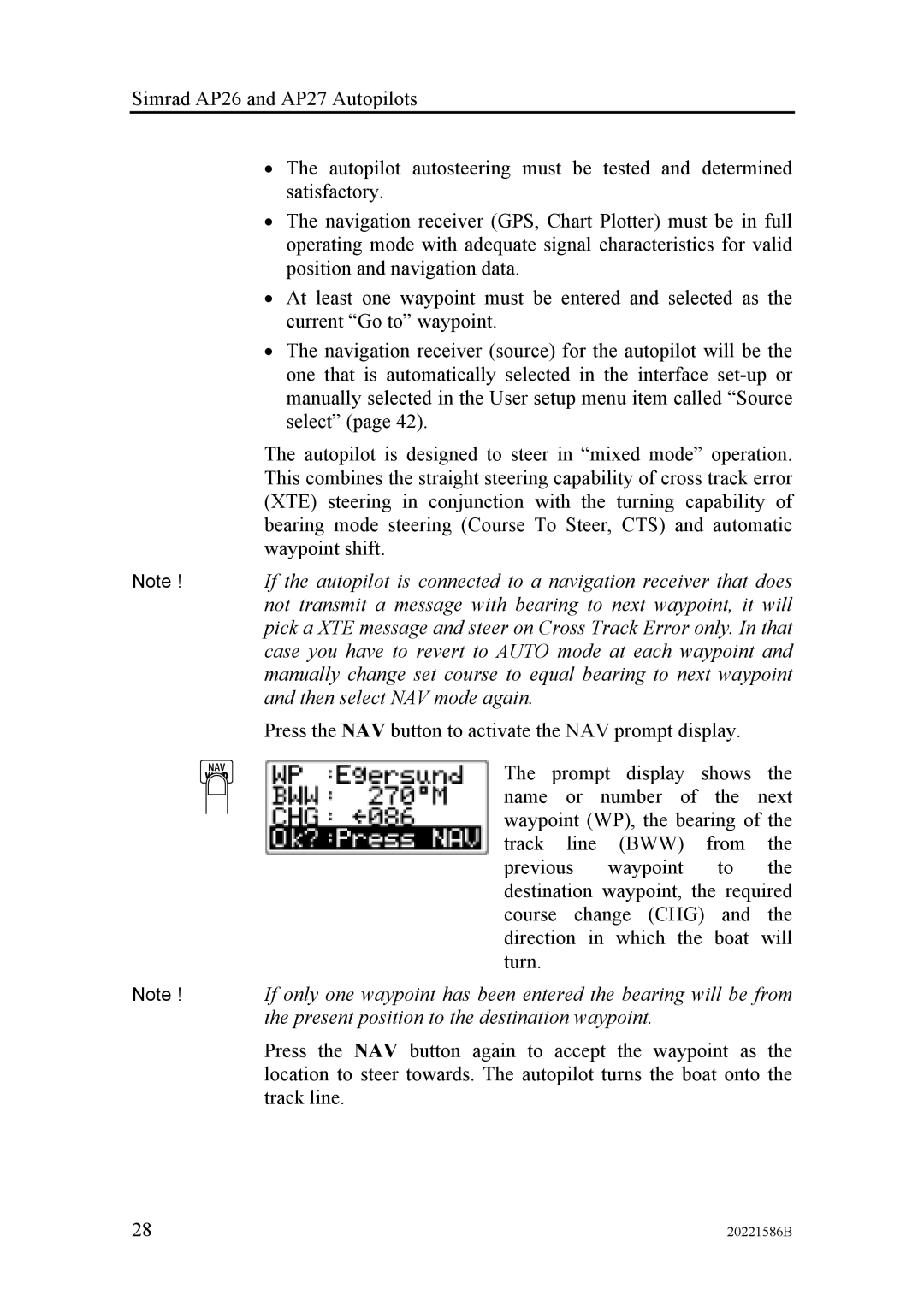
Press the NAV button to activate the NAV prompt display.
The prompt display shows the name or number of the next waypoint (WP), the bearing of the track line (BWW) from the previous waypoint to the destination waypoint, the required course change (CHG) and the direction in which the boat will turn.
If only one waypoint has been entered the bearing will be from the present position to the destination waypoint.
Press the NAV button again to accept the waypoint as the location to steer towards. The autopilot turns the boat onto the track line.
28 | 20221586B |