Simrad AP26 and AP27
This page is intentionally left blank
20221586B
Document revisions
Contents
Racing
Installation
Configuration and setup
115
Trouble shooting 118
General
How to use this manual
AP26 Basic system
System components
Autopilot Computer
AP26 Control Unit
AP27 Control Unit
Heading Sensors
RF300 Rudder Feedback unit
RC36 Rate compass
RFC35 Electronic Fluxgate Compass optional
Simrad RGC10 and RGC50 gyrocompasses
Nmea compass optional
Optional equipment
R3000X Remote Control
JS10 Joystick
FU25 Follow-Up Steering Lever
Overview
Operation
AP27 Front Panel
AP26
ON/OFF Standby mode
Zero point setting
Alarms
AP26 and AP27 with MSD50 Stern Drive Unit
Flashing course knob icon
Follow-Up steering FU
Non-Follow-Up steering NFU
JS10 Joystick NFU
R3000X Remote Control NFU
Initial mode 1st press 2nd press
TURN/DODGE/INFO button
Automatic Steering
Heading catch
Automatic control of steering parameters
Power boat
Sailboat
Manual Parameter Selection
Turn
Dodge in Auto
Navigating with the AP26 and AP27
Tacking in Auto mode
NAV
− NAV mode
Setting the waypoint arrival circle
Selecting a different Navigation source
Dodge in NAV
Wind vane steering
Tacking and gybing in Wind mode
Tack and gybe prevent
Gybing
Wind steering and navigation
Simrad AP26 and AP27 Autopilots
Racing
Operating in Windnav mode
Lock function
Multiple station system
User Set-up Menu
Standby Mode
Alternating Course Knob Icon
Backlight
Nav/Wind, Racing parameters
Nav/Wind
Layline Steering
VMG Optimizing
Instrument Select
Auto source update
Source Select
Manual select
Compass
Water temperature
Navigation
Position
Course Adjust
Auto Mode
DisLog
Depth
Wind Mode
NAV Mode
Response
Wind response
Info menu
Standby mode
Auto mode
Depth/Speed
Nav mode
Apparent wind
True wind
Course knob icon
Sea Temperature
Track data
Nav data
Info menu flowchart
Info menu and Main Screen, inactive unit
Alternative mode screens in STBY, Auto and NAV
Info menu and Main screen, active unit
Installation checklist
Installation
Unpacking and handling
Determine system configuration
Autopilot System Layout
RF300 Rudder feedback installation
RF300 mounting
Cable connections
Autopilot computer installation
Cable length Drive Unit Voltage
Grounding and RFI
Ground terminal
Hydraulic Pumps
Drive unit installation
Linear Drive Units
Previous Models of Drive Units
Connecting a reversible pump
Connecting a solenoid valve
Connecting a hydraulic linear drive
Panel mounting of AP26
Control unit installation
Alternative panel mounting of AP26
Do not over-tighten the mounting screws
See note on
ROBNET2 network cables
Optional bracket mounting
System
Cable pairs Color code Signal
AP27 connection
13 RC36 Rate Compass installation
20221586B
14 RFC35 connection
14 RFC35 Fluxgate Compass installation
16 JS10 Joystick
15 R3000X Remote Control installation
17 S35 NFU Lever installation
SimNet
Interfacing
SimNet network cables
SimNet power and termination
17 SimNet network, small system
19 SimNet/NMEA2000 network, medium system
20 Robnet2 and SimNet network
21 Robnet2, SimNet and Roblink network
Double Nmea input/output
Single Nmea input/output
Nmea Compass input
Nmea output on Port
Radar Clock/Data
25 IS15 Instrument installation
26 IS15 Instruments / Autopilot computer connection
27 LF3000 Linear Feedback
External Alarm
29 LF3000 mounting
30 LF3000/LFI3000 Mk2 connections
20221586B
First time turn on
Configuration and Setup
Description of Installation Settings
Installation Menu
Installation Menu Flow Chart
Language selection
Dockside settings
Drive unit voltage
Boat type
Rudder Feedback Calibration
Rudder Test
Drive engage
Rudder Deadband
Wind setup
Tack angle Racing
Minimum wind angle Normal
Minimum wind angle Racing
Tack time Racing
Wind shift alarm limit Racing
Display units
Interface Settings
Sea Trial
Minimum rudder
Set Rudder zero
Compass calibration
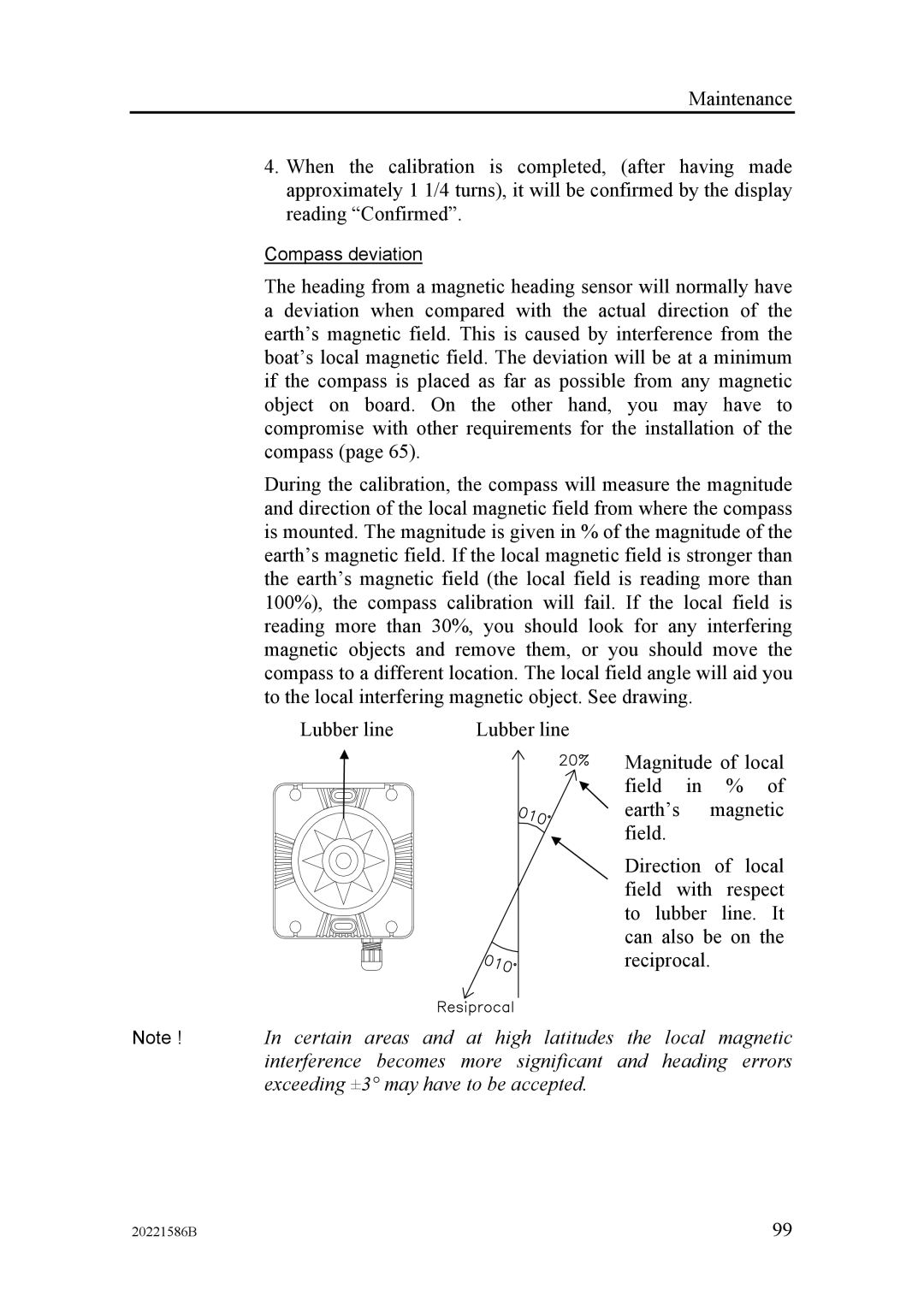
Local magnetic and heading errors
Compass Offset
Wind damping
Wind Offset
Depth Offset
Automatic tuning
Transition Speed
Init NAV
Parameters
Tuning
Manual parameter adjust
106
Recall Autotuned?
Service Menu
SimNet and Nmea Data Screen
System Data Menu
INV
Group selection
SimNet setup
Nmea Port test AC hardware
Backlight Illumination
Global SimNet reset
Instance number
SimNet gateway
Final sea trial
Master Reset
Providing user training
114
Rudder Feedback
Control unit
Compass
Drive unit
Autopilot Computer
Exchange of software programme
Part of AP26 PCB
Autopilot Control Unit
Alarms
Trouble Shooting
User Setup2/Source select
Display readout Probable fault Recommended action
PCB
Acxx
Com. failure with Faulty Autopilot Check Robnet2 connectors
Autopilot Computers
AP26 Control Unit
AP27 Control Unit
RC36 Rate compass
RFC35 Electronic Fluxgate Compass
RF300 Rudder Feedback Unit
Robnet2 cables
Tools
SimNet cables and accessories
AP26 and AP27 Autopilot System
Technical Specifications
Instrument screen NMEA0183 messages and SimNet
128
AP27 Control Unit dimensions
Autopilot Computers
AC10/AC20 Autopilot computer Dimensions
RC36 Rate compass
RC36 Rate Compass Dimensions
RF300 Rudder Feedback
RFC35 Fluxgate compass
RF300 Rudder Feedback Dimensions
JS10 Joystick
R3000X Remote Control
10 FU25 Steering Lever
10 FU25 Steering Lever Dimensions
Nmea 0183, HDG, HDM, HDT
11 IS15 Rudder
11 IS15 Rudder Dimensions
Tests
IP protection
NMEA0183 messages and data overview for AC10, AC20, AC40
Nmea and SimNet messages
141
Information required to operate in Windn mode
143
Glossary
145
146
Index
148
149
150