TTCAN | User’s Manual | Revision 1.6 |
manual_about.fm
2.3.4.4 Loop Back Mode
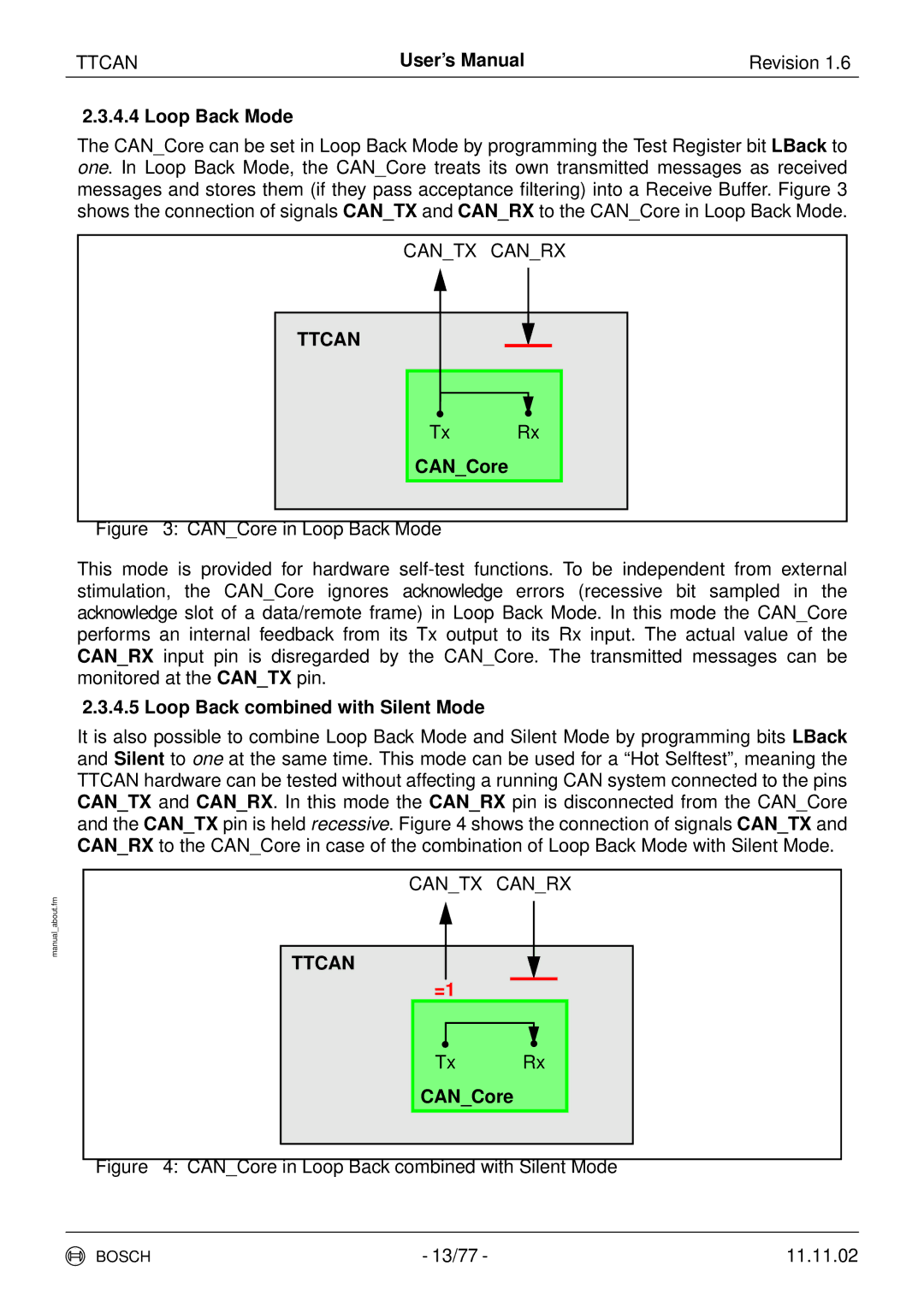
The CAN_Core can be set in Loop Back Mode by programming the Test Register bit LBack to one. In Loop Back Mode, the CAN_Core treats its own transmitted messages as received messages and stores them (if they pass acceptance filtering) into a Receive Buffer. Figure 3 shows the connection of signals CAN_TX and CAN_RX to the CAN_Core in Loop Back Mode.
CAN_TX CAN_RX
TTCAN
• •
Tx Rx
CAN_Core
Figure 3: CAN_Core in Loop Back Mode
This mode is provided for hardware self-test functions. To be independent from external stimulation, the CAN_Core ignores acknowledge errors (recessive bit sampled in the acknowledge slot of a data/remote frame) in Loop Back Mode. In this mode the CAN_Core performs an internal feedback from its Tx output to its Rx input. The actual value of the CAN_RX input pin is disregarded by the CAN_Core. The transmitted messages can be monitored at the CAN_TX pin.
2.3.4.5 Loop Back combined with Silent Mode
It is also possible to combine Loop Back Mode and Silent Mode by programming bits LBack and Silent to one at the same time. This mode can be used for a “Hot Selftest”, meaning the TTCAN hardware can be tested without affecting a running CAN system connected to the pins CAN_TX and CAN_RX. In this mode the CAN_RX pin is disconnected from the CAN_Core and the CAN_TX pin is held recessive. Figure 4 shows the connection of signals CAN_TX and CAN_RX to the CAN_Core in case of the combination of Loop Back Mode with Silent Mode.
CAN_TX CAN_RX
TTCAN
=1
• | • |
Tx | Rx |
CAN_Core
Figure 4: CAN_Core in Loop Back combined with Silent Mode
BOSCH | - 13/77 - | 11.11.02 |