TTCAN | User’s Manual | Revision 1.6 |
manual_about.fm
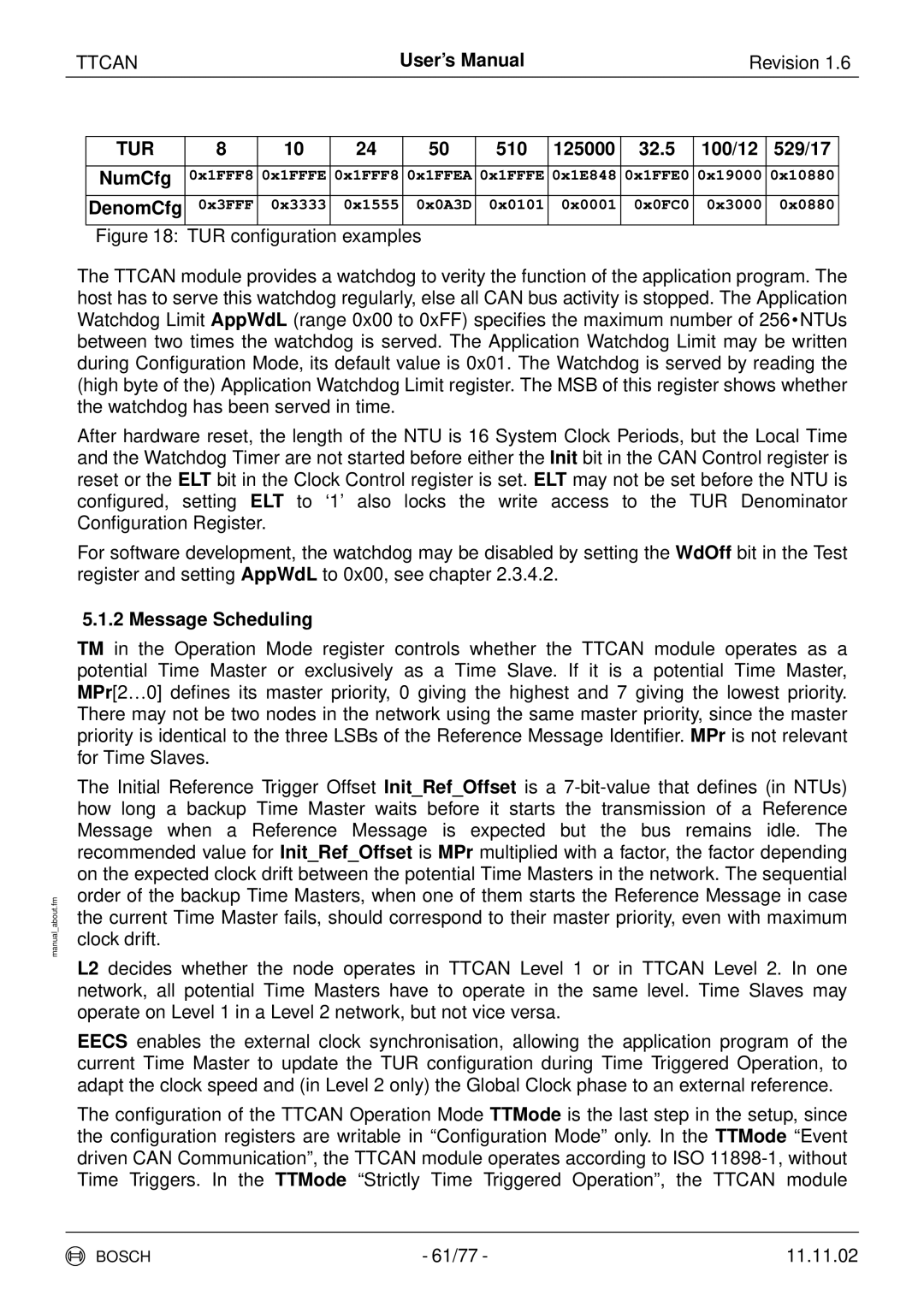
TUR | 8 | 10 | 24 | 50 | 510 | 125000 | 32.5 | 100/12 | 529/17 |
|
|
|
|
|
|
|
|
|
|
NumCfg | 0x1FFF8 | 0x1FFFE | 0x1FFF8 | 0x1FFEA | 0x1FFFE | 0x1E848 | 0x1FFE0 | 0x19000 | 0x10880 |
|
|
|
|
|
|
|
|
|
|
DenomCfg | 0x3FFF | 0x3333 | 0x1555 | 0x0A3D | 0x0101 | 0x0001 | 0x0FC0 | 0x3000 | 0x0880 |
|
|
|
|
|
|
|
|
|
|
Figure 18: TUR configuration examples
The TTCAN module provides a watchdog to verity the function of the application program. The host has to serve this watchdog regularly, else all CAN bus activity is stopped. The Application Watchdog Limit AppWdL (range 0x00 to 0xFF) specifies the maximum number of 256•NTUs between two times the watchdog is served. The Application Watchdog Limit may be written during Configuration Mode, its default value is 0x01. The Watchdog is served by reading the (high byte of the) Application Watchdog Limit register. The MSB of this register shows whether the watchdog has been served in time.
After hardware reset, the length of the NTU is 16 System Clock Periods, but the Local Time and the Watchdog Timer are not started before either the Init bit in the CAN Control register is reset or the ELT bit in the Clock Control register is set. ELT may not be set before the NTU is configured, setting ELT to ‘1’ also locks the write access to the TUR Denominator Configuration Register.
For software development, the watchdog may be disabled by setting the WdOff bit in the Test register and setting AppWdL to 0x00, see chapter 2.3.4.2.
5.1.2 Message Scheduling
TM in the Operation Mode register controls whether the TTCAN module operates as a potential Time Master or exclusively as a Time Slave. If it is a potential Time Master, MPr[2…0] defines its master priority, 0 giving the highest and 7 giving the lowest priority. There may not be two nodes in the network using the same master priority, since the master priority is identical to the three LSBs of the Reference Message Identifier. MPr is not relevant for Time Slaves.
The Initial Reference Trigger Offset Init_Ref_Offset is a
L2 decides whether the node operates in TTCAN Level 1 or in TTCAN Level 2. In one network, all potential Time Masters have to operate in the same level. Time Slaves may operate on Level 1 in a Level 2 network, but not vice versa.
EECS enables the external clock synchronisation, allowing the application program of the current Time Master to update the TUR configuration during Time Triggered Operation, to adapt the clock speed and (in Level 2 only) the Global Clock phase to an external reference.
The configuration of the TTCAN Operation Mode TTMode is the last step in the setup, since the configuration registers are writable in “Configuration Mode” only. In the TTMode “Event driven CAN Communication”, the TTCAN module operates according to ISO
BOSCH | - 61/77 - | 11.11.02 |