TTCAN | User’s Manual | Revision 1.6 |
manual_about.fm
The Arbitration Registers
The Data Length Code
The Mask Registers
If the RxIE bit is set, the IntPnd bit will be set when a received Data Frame is accepted and stored in the Message Object.
If the TxRqst bit is set, this will cause the transmission of a Remote Frame with the same identifier as actually stored in the Arbitration Register. The content of the Arbitration Register may change if the Mask Registers are used (UMask=’1’) for acceptance filtering.
4.2.2.3 Configuration of a FIFO Buffer
With the exception of the EoB bit, the configuration of Receive Objects belonging to a FIFO Buffer is the same as the configuration of a (single) Receive Object, see section 4.2.2.2.
To concatenate two or more Message Objects into a FIFO Buffer, the identifiers and masks (if used) of these Message Objects have to be programmed to matching values. Due to the implicit priority of the Message Objects, the Message Object with the lowest number will be the first Message Object of the FIFO Buffer. The EoB bit of all Message Objects of a FIFO Buffer except the last one have to be programmed to zero. The EoB bits of the last Message Object of a FIFO Buffer is set to one, configuring it as the End of the Block.
4.2.2.4 Configuration of a Single Receive Object for Remote Frames
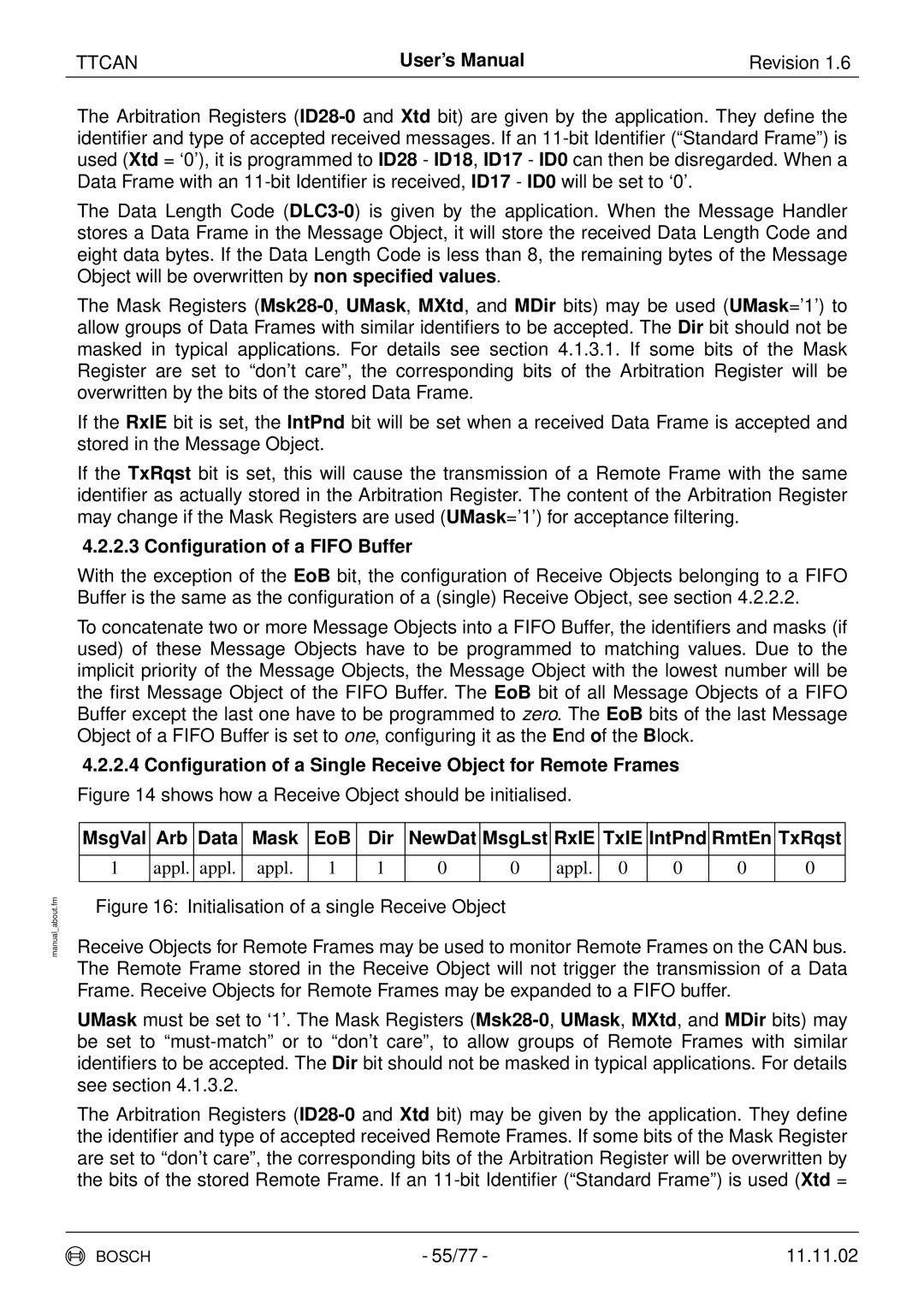
Figure 14 shows how a Receive Object should be initialised.
MsgVal | Arb | Data | Mask | EoB | Dir | NewDat | MsgLst | RxIE | TxIE | IntPnd | RmtEn | TxRqst | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 | appl. | appl. | appl. | 1 | 1 | 0 |
| 0 | appl. | 0 | 0 | 0 | 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 16: Initialisation of a single Receive | Object |
|
|
|
|
| |||||||
Receive Objects for Remote Frames may be used to monitor Remote Frames on the CAN bus. The Remote Frame stored in the Receive Object will not trigger the transmission of a Data Frame. Receive Objects for Remote Frames may be expanded to a FIFO buffer.
UMask must be set to ‘1’. The Mask Registers
The Arbitration Registers
BOSCH | - 55/77 - | 11.11.02 |