TTCAN | User’s Manual | Revision 1.6 |
manual_about.fm
Data 0 1st data byte of a CAN Data Frame
Data 1 2nd data byte of a CAN Data Frame
Data 2 3rd data byte of a CAN Data Frame
Data 3 4th data byte of a CAN Data Frame
Data 4 5th data byte of a CAN Data Frame
Data 5 6th data byte of a CAN Data Frame
Data 6 7th data byte of a CAN Data Frame
Data 7 8th data byte of a CAN Data Frame
Note : Byte Data 0 is the first data byte shifted into the shift register of the CAN Core during a recep- tion, byte Data 7 is the last. When the Message Handler stores a Data Frame, it will write all the eight data bytes into a Message Object. If the Data Length Code is less than 8, the remaining bytes of the Message Object will be overwritten by non specified values .
3.4 Message Handler Registers
All Message Handler registers are
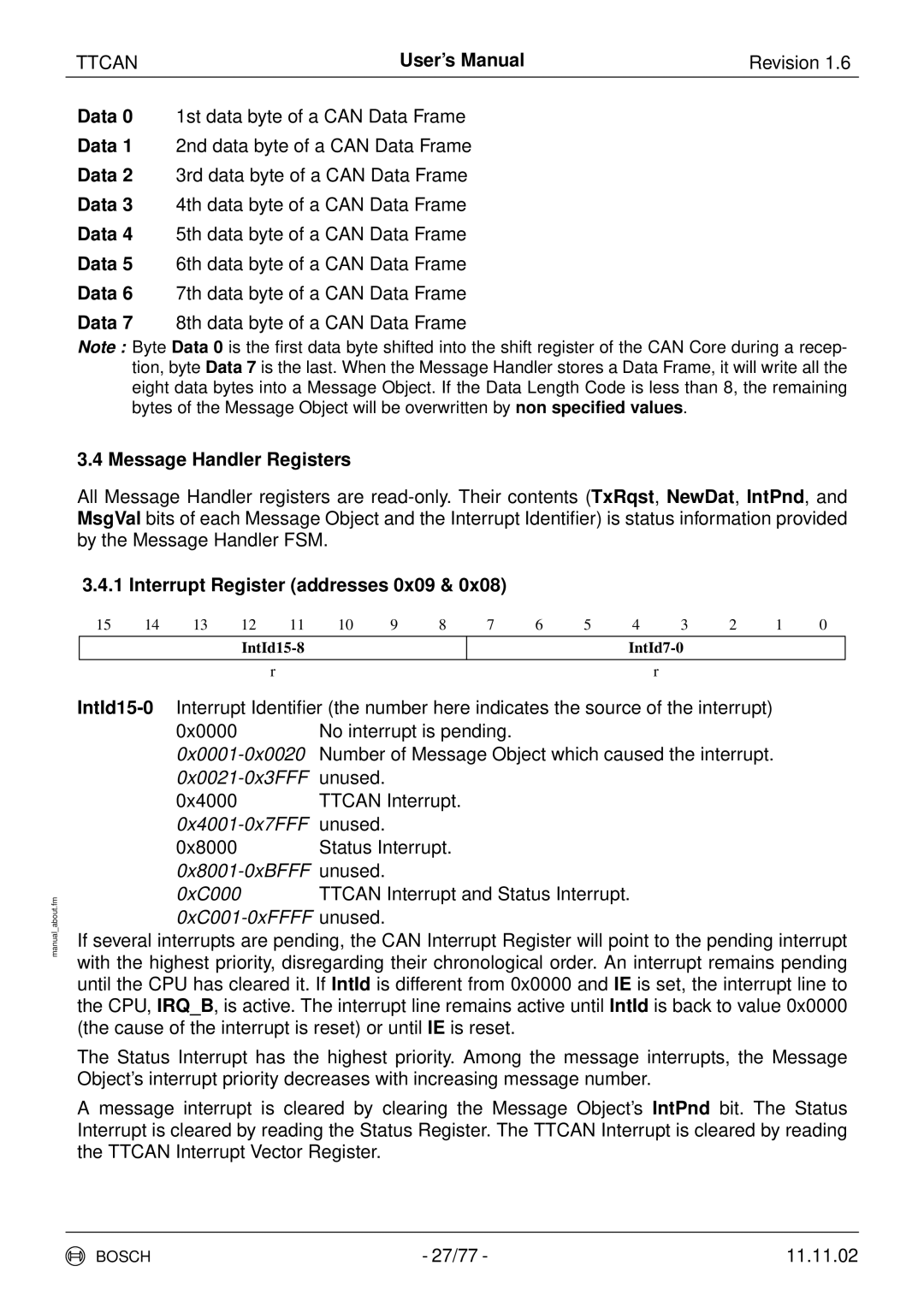
3.4.1 Interrupt Register (addresses 0x09 & 0x08)
15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| r |
|
|
|
|
|
|
| r |
|
|
|
|
| |||||||||||||||
|
|
| 0x0000 |
|
| No interrupt is pending. |
|
|
|
|
|
|
| |||
|
|
| Number of Message Object which caused the interrupt. |
|
| |||||||||||
|
|
| unused. |
|
|
|
|
|
|
|
|
|
| |||
|
|
| 0x4000 |
|
| TTCAN Interrupt. |
|
|
|
|
|
|
|
| ||
|
|
| unused. |
|
|
|
|
|
|
|
|
|
| |||
|
|
| 0x8000 |
|
| Status Interrupt. |
|
|
|
|
|
|
|
| ||
|
|
| unused. |
|
|
|
|
|
|
|
|
|
| |||
|
|
| 0xC000 |
|
| TTCAN Interrupt and Status Interrupt. |
|
|
|
| ||||||
0xC001-0xFFFF unused.
If several interrupts are pending, the CAN Interrupt Register will point to the pending interrupt with the highest priority, disregarding their chronological order. An interrupt remains pending until the CPU has cleared it. If IntId is different from 0x0000 and IE is set, the interrupt line to the CPU, IRQ_B, is active. The interrupt line remains active until IntId is back to value 0x0000 (the cause of the interrupt is reset) or until IE is reset.
The Status Interrupt has the highest priority. Among the message interrupts, the Message Object’s interrupt priority decreases with increasing message number.
A message interrupt is cleared by clearing the Message Object’s IntPnd bit. The Status Interrupt is cleared by reading the Status Register. The TTCAN Interrupt is cleared by reading the TTCAN Interrupt Vector Register.
BOSCH | - 27/77 - | 11.11.02 |