TTCAN | User’s Manual | Revision 1.6 |
A given bit rate may be met by different bit time configurations, but for the proper function of the CAN network the physical delay times and the oscillator’s tolerance range have to be considered.
Parameter | Range | Remark |
|
|
|
BRP | [1 … 32] | defines the length of the time quantum tq |
Sync_Seg | 1 tq | fixed length, synchronisation of bus input to system clock |
Prop_Seg | [1 … 8] tq | compensates for the physical delay times |
Phase_Seg1 | [1 … 8] tq | may be lengthened temporarily by synchronisation |
Phase_Seg2 | [1 … 8] tq | may be shortened temporarily by synchronisation |
SJW | [1 … 4] tq | may not be longer than either Phase Buffer Segment |
This table describes the minimum programmable ranges required by the CAN protocol
Table 1 : Parameters of the CAN Bit Time
4.2.1.2 Propagation Time Segment
This part of the bit time is used to compensate physical delay times within the network. These delay times consist of the signal propagation time on the bus and the internal delay time of the CAN nodes.
Any CAN node synchronised to the bit stream on the CAN bus will be out of phase with the transmitter of that bit stream, caused by the signal propagation time between the two nodes. The CAN protocol’s
manual_about.fm
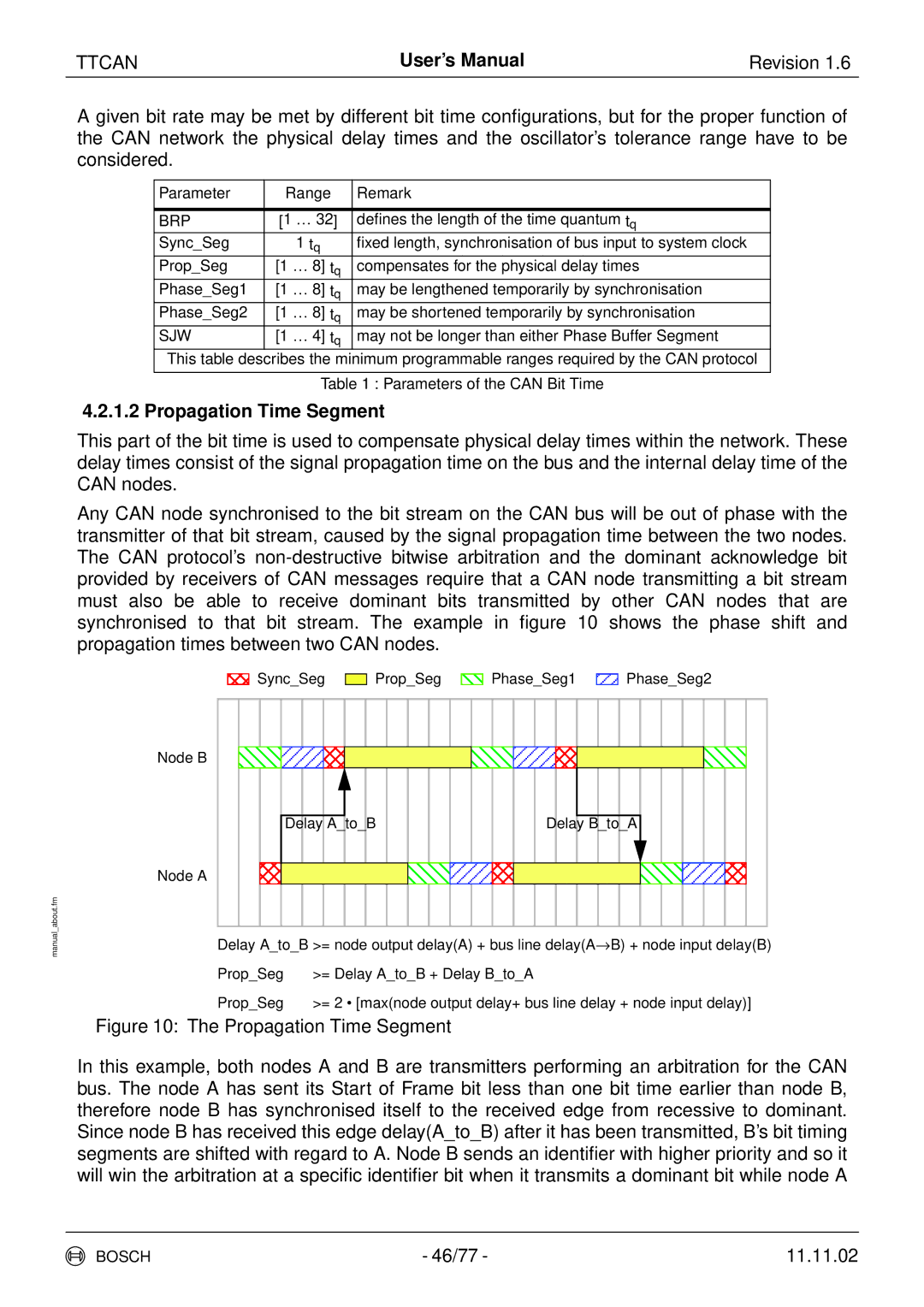
Sync_Seg | Prop_Seg | Phase_Seg1 | Phase_Seg2 | |
Node B |
|
|
|
|
| Delay A_to_B | Delay B_to_A | ||
Node A |
|
|
|
|
Delay A_to_B >= node output delay(A) + bus line delay(A→B) + node input delay(B) | ||||
Prop_Seg | >= Delay A_to_B + Delay B_to_A |
| ||
Prop_Seg | >= 2 • [max(node output delay+ bus line delay + node input delay)] | |||
Figure 10: The Propagation Time Segment
In this example, both nodes A and B are transmitters performing an arbitration for the CAN bus. The node A has sent its Start of Frame bit less than one bit time earlier than node B, therefore node B has synchronised itself to the received edge from recessive to dominant. Since node B has received this edge delay(A_to_B) after it has been transmitted, B’s bit timing segments are shifted with regard to A. Node B sends an identifier with higher priority and so it will win the arbitration at a specific identifier bit when it transmits a dominant bit while node A
BOSCH | - 46/77 - | 11.11.02 |